


傾儖僇儕揹抮偲儅儞僈儞揹抮偲偺壙奿嵎偑彮側偔側偭偰丄挿庻柦偱僷儚乕偺偁傞傾儖僇儕揹抮傪巊偆婡夛偑懡偔側偭偰偒傑偟偨偑丄傾儖僇儕揹抮傪婡婍偵僙僢僩偟偨傑傑挿帪娫曻抲偟偰偍偔偲塼楻傟傪婲偙偟丄婡婍杮懱偑巊偊柍偔側偭偰偟傑偆偙偲偑傛偔偁傝傑偡丅偦偙偱丄偳傫側婡婍偵儅儞僈儞揹抮傕偟偔偼傾儖僇儕揹抮偑岦偄偰偄傞偺偐丄嵞妋擣偟傑偟偨丅
| 丂 | 儅儞僈儞揹抮 | 傾儖僇儕揹抮 |
| 摿丂挜 | 仜傾儖僇儕揹抮偵斾傋偰塼楻傟偑偟偵偔偄 仜媥傒媥傒巊偆偲揹椡偑夞暅偡傞 仠戝揹椡傪昁梫偲偡傞婡婍偵偼巊偊側偄 |
仜儅儞僈儞揹抮傛傝僷儚乕偑偁傞 仜巊梡婜尷偑挿偄乮10擭乯 仠晠怘惈偑崅偄揹夝塼偱塼楻傟偟堈偄 |
| 悇彠梡搑 | 儕儌僐儞丄僉僢僠儞僞僀儅乕丄帪寁丄 夰拞揹摂丄儁儞儔僀僩丄丒丒丒 乮彫揹椡偱丄巊傢側偄帪娫偑懡偄乯 |
僿僢僪儂儞丄儔僕僇僙丄僨僕僞儖僇儊儔丄 揹摦帟僽儔僔丄儔僕僐儞丄丒丒丒 (僷儚乕偑昁梫丄挿帪娫楢懕巊梡乯 |
| 塼楻傟懳嶔 | 塼楻傟偟偵偔偄偺偱丄揹抮徚栒僠僃僢僋偑 朰傟傗偡偄挿婜娫曻抲偟偰偍偔婡婍偵岦偔 |
揹抮偺徚栒偑捈偖敾傞傛偆偵丄妋擣娫妘偑 抁偄傛偔巊偆婡婍偵岦偔 |
撪曪昞尰(comprehension expression丄媡偼奜墑extension)偲偼丄儕僗僩傗帿彂側偳偺僆僽僕僃僋僩偺儖乕僾張棟傪娙扨丒僔儞僾儖偵婰弎偱偒傞婰朄偱丄撪曪昞婰偺庬椶偲偟偰師偺4偮偑偁傞丅
|
亙婏悢傪庢傝弌偡filter巊梡椺亜
def is_mod(x):
return x % 2 == 1
list(filter(is_mod, range(1 ,10)))
|
| 丂 | 丂 |
|
亙map偵傛傞梫慺枅偺墘嶼椺亜
def square(x):
return x * x
list(map(square , range(1 ,5)))
|
| 丂 | 丂 |
|
亙zip巊梡椺侾亜 list1 = [1, 2, 3] list2 = [4, 5, 6] list3 = [x * y for x, y in zip(list1, list2)] print(list3) 亙zip巊梡椺俀亜
list={[1,2,3],[4,5,6],[7,8,9]}
for (a,b,c)in zip(*list):
print a,b,c
|
abc752偱嶌惉偟偨PWM僷儖僗偼僜僼僩僂僃傾偱嶌惉偟偨偨傔惛搙偑埆偔丄儌乕僞乕偑傆傜偮偔偙偲偑偁傞丅偦偙偱丄僴乕僪僂僃傾偱崅惛搙偺僷儖僗暆傪摼傞偨傔乮ALT5儌乕僪乯WiringPi傪棙梡偟丄埨壙側僒乕儃儌乕僞乕乮SG-90丄\400乯傪儔僘僷僀偱惂屼偟偨丅
丂僒乕儃儌乕僞惂屼傪峴偆慜偵丄LED揰摂偱WiringPi偺巊偄曽傗摦嶌傪僥僗僩偡傞丅
亂WiringPi偺僀儞僗僩乕儖偲僥僗僩亃
|
亙SG-90偺庡側巇條亜 丂丂僷儖僗暆丗丂丂0.5乣2.4mS 丂丂廃攇悢丗丂丂丂50Hz(20mS) 丂丂惷巭僩儖僋丗丂1.8kgf 丂丂摦嶌揹埑丗丂丂4.8乣5V 丂丂儗儞僕丗丂丂丂1920 
|
亙wp_LED.py亜 |
# use for python2
import wiringpi as wp
from time import sleep
LED = 23
wp.wiringPiSetupGpio()
wp.pinMode(LED, wp.GPIO.OUTPUT)
while True:
wp.digitalWrite(LED, 1)
sleep(5)
wp.digitalWrite(LED, 0)
sleep(5)
| |
| 丂 | 亙wp_LEDb.py亜 |
 LED_PWM攇宍 乮Balance儌乕僪丄50%丄5mS/Div乯 |
# use for python2
import wiringpi as wp
LED = 18
wp.wiringPiSetupGpio()
wp.pinMode(LED,wp.GPIO.PWM_OUTPUT)
wp.pwmSetRange(1920)
wp.pwmSetClock(200)
try:
while True:
duty = input("duty? : ")
if duty< 1 or duty > 100:
break
wp.pwmWrite(LED,duty)
finally:
print "End"
|
亂Wiringpi傪巊偭偰僒乕儃儌乕僞乕惂屼亃
丂WiringPi偺PWM攇宍偺僨僼僅儖僩偼Balance儌乕僪乮廃攇悢偑曄傢傞乯偱僷儖僗偑壓恾偺傛偆偵暯嬒壔偝傟丄婜懸偡傞僷儖僗暆偑摼傜傟側偄偺偱丄Mark-Space儌乕僪乮廃攇悢堦掕乯傪巜掕偡傞昁梫偑偁傞丅
丂丂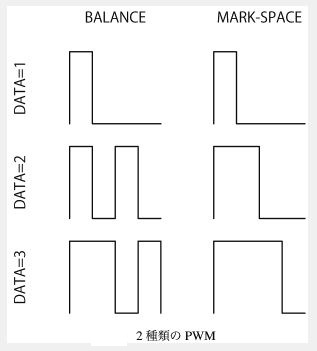
| 亙僴乕僪儌乕僪servo-h.py亜 | 丂 | 亙僜僼僩儌乕僪servo-s.py亜 |
# use for python2
from wiringpi import *
PWM0 = 18
#PWM1 = 19
def setupMotor(id):
wiringPiSetupGpio()
pinMode(id, GPIO.PWM_OUTPUT)
pwmSetMode(GPIO.PWM_MODE_MS)
pwmSetRange(1920)
pwmSetClock(200)
if __name__ == '__main__' :
try:
setupMotor(PWM0)
print "setup GPIO:" ,PWM0
while True:
angle = input("count? : ")
if angle == 0:
pwmWrite(PWM0, 139)
print "Move -> 0"
break
elif angle < 48 or angle > 230:
print "ERROR: range(48-230)"
else:
pwmWrite(PWM0, angle)
print "Move -> ",angle
finally:
print "End"
|
丂 |
# use for python2
import wiringpi as wp
PWM_PIN = 23
def setupMotor(id):
wp.wiringPiSetupGpio()
wp.pinMode(id,wp.PWM_OUTPUT)
wp.softPwmCreate(id,0,100)
if __name__ == '__main__' :
try:
setupMotor(PWM_PIN)
print "setup GPIO:" ,PWM_PIN
while True:
duty = input("duty(%)? : ")
if duty == 0:
wp.softPwmWrite(PWM_PIN, 0)
print "duty -> 0"
break
elif duty < 0 or duty > 99:
print "ERROR: range (0-99)"
else:
wp.softPwmWrite(PWM_PIN,duty)
print "duty -> ",duty
finally:
print "End"
|
 |
 |
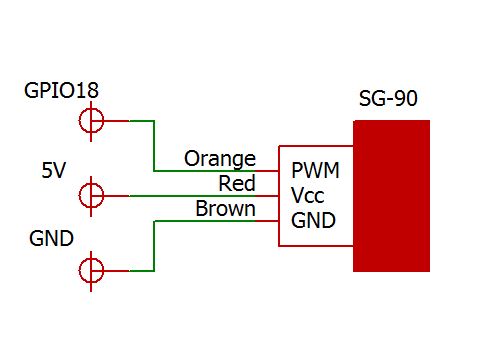
| 僒乕儃儌乕僞乕攝慄恾 | 僒乕儃儌乕僞乕惂屼拞 |
 |
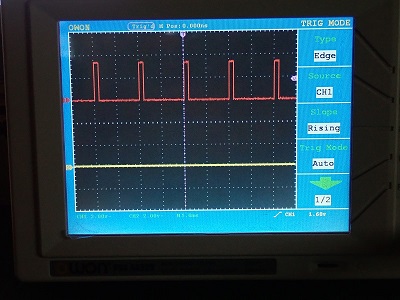 |
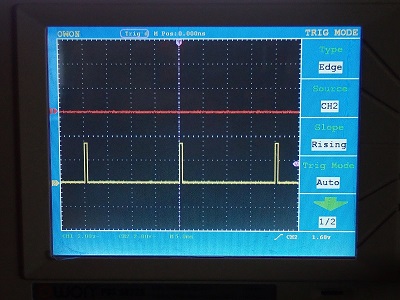
| 僴乕僪儌乕僪攇宍椺(Mark-Space儌乕僪丄1mS) (僜僼僩傪巭傔偰傕弌椡偼宲懕丄5mS/Div乯 |
僜僼僩儌乕僪攇宍椺乮10%乯 乮僒僀僋儖娫妘偼10mS丄5mS/Div乯 |
 |
 |
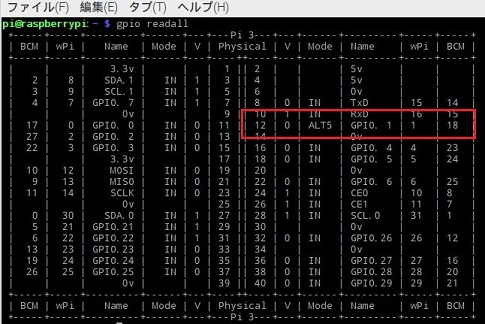
| 僴乕僪儌乕僪 乮GPIO18偑ALT5偵側偭偰偄傞乯 |
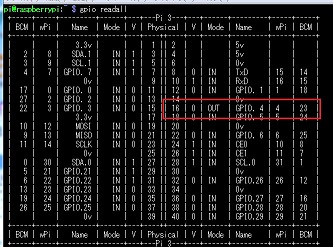
僜僼僩儌乕僪 乮GPIO23偑OUT偵側偭偰偄傞乯 |
 |
 |
 |