


携帯電話やパソコンなど電気製品を使っていると、機器から電磁波が出ていて「人体に影響がないか」と思うことがある。そこで、ERICKHILLのEMFテスターRT-100(1,914円)を入手した。
| 雷雲時の地表: | 3000~20000 V/m |
| 送電線の下: | 100~3000 V/m |
| (液晶)モニタ: | 50~200 V/m |
| パソコン: | 300~800 V/m |
| スマホ: | 15~25 V/m |
測定値は結構変動し、意外と大きいと感ずるが、距離を離すと大きく減少する。ちなみの複数のパソコンのモニタに囲まれ、30cm離れた所では、93 V/m、0.16μT程度であった。
電磁界による健康影響については、被曝をうけている間のみの「短期的被爆」と、「長期的な被爆」によるガンなどの病気が引き起こされる可能性が考えられているが、いずれも科学的な結論が出ていない。
身の回りの電磁界の強さ、
電磁界情報センター などを参考に。

スマホの測定例 |

モニタテレビの測定例 |
★【参考】
前報(abc850)までに列車の走行制御と列車センサの動作確認ができたので、列車の速度を変化させて自動加減速運転を試みる。レールレイアウトは C103レールを使用したループで、磁気センサを1個設置したものを用いた。ハードウェア(制御回路)は PIC16F18325 を使った abc850 と同じ。
列車の走行パターンは、加減速を繰り返しながら、指定された速度で定速走行を行うもので、センサを感知する毎にステップを進め、速度の切替を行っている。なお、徐行時にセンサが列車を検知すると列車は停止し、一定の時間経過後に再び(最初から)走行を繰り返す自動運転パターンである。
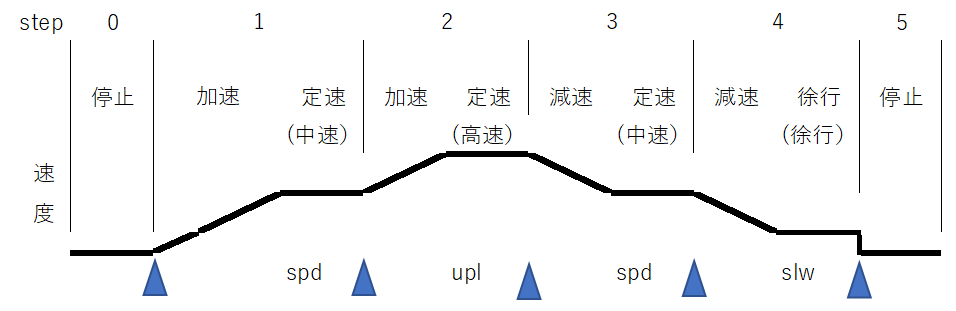
列車の運行パターン図 |
【主な変数】
|
struct train_p{
uint8_t acf; // 加速係数
uint8_t dcf; // 減速係数
uint16_t rsL; // 走行停止PWMパルス幅
uint16_t upL; // 走行上限PWMパルス幅
uint16_t slw; // 徐行時PWMパルス幅(停止準備)
};
struct drv_val{
uint8_t nxt; // 次ステップ番号
uint16_t spd; // 指令走行PWMパルス幅
uint8_t drc; // 指令走行方向
uint16_t stm; // 停止時間 (100ms単位)
};
走行テストに用いた列車は「C103レール」に対応する「TM-03動力ユニット」を付けた「デキ100」で、「粘着付き超強力 ネオジウムマグネットシート」(RMG-026、t = 0.8mm、和気産業、1,500円)を5mm角(60 mT)に切って床下に貼付けた。なお、同じ厚みの強力フェライトシート(1cm角で15 mT)では磁気センサが列車を検知せず。
今回の例では、周回レール長が短いので、センサーを1個しか使わなかったが、周回レール長が長い場合や単線往復運転の場合、複数のセンサ(最大4個)をセットし、それに併せて状態変化割り込み処理を記述することで、ホーム停車・往復運転などの自動運転が可能となる。
なお、関数のプロトタイプ宣言は、同じファイル内で関数を使用する前に記述することで省略している。必要であればヘッダーファイル(train.h)中で宣言して下さい。また、PICでのデバッグを容易にするためグローバル変数を多用したが、ローカル変数に変更も可能。

デキ100の床下に磁石を貼付 |
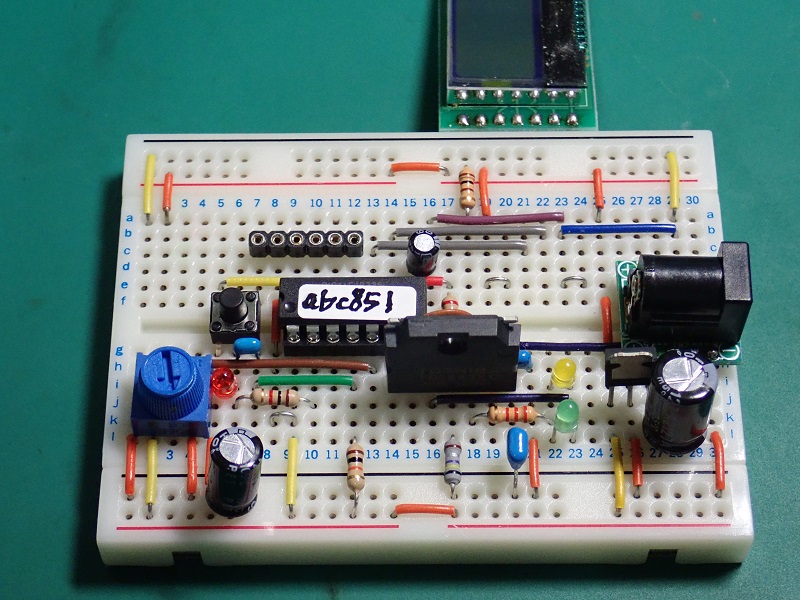
LCDを外した試作回路 |
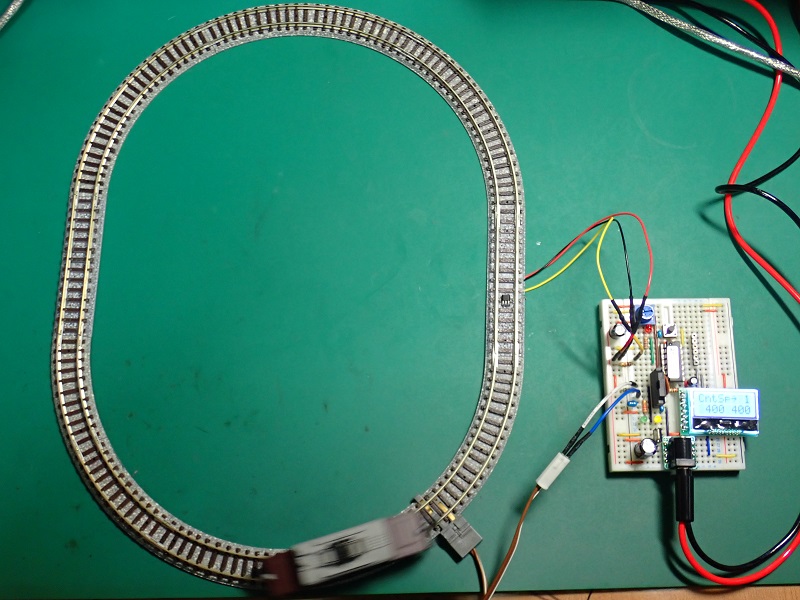
自動運転中の様子 |
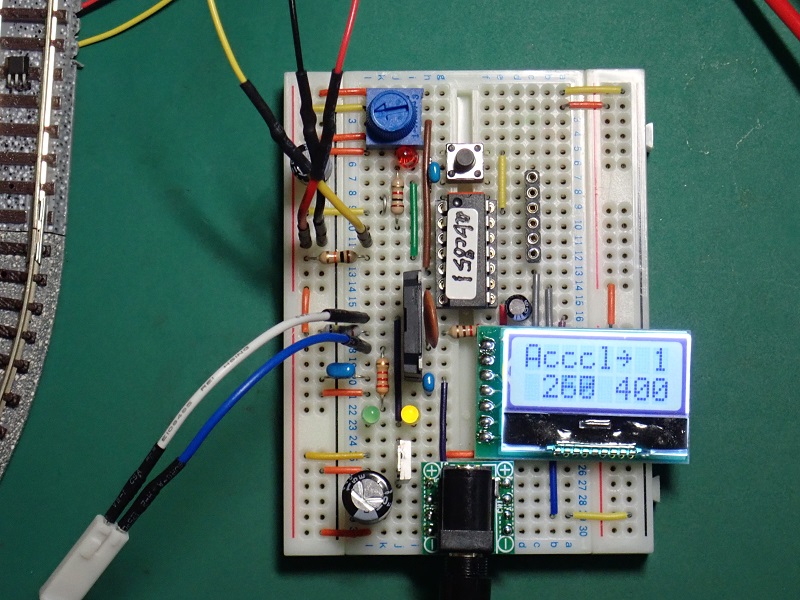
状態表示例1(加速) |
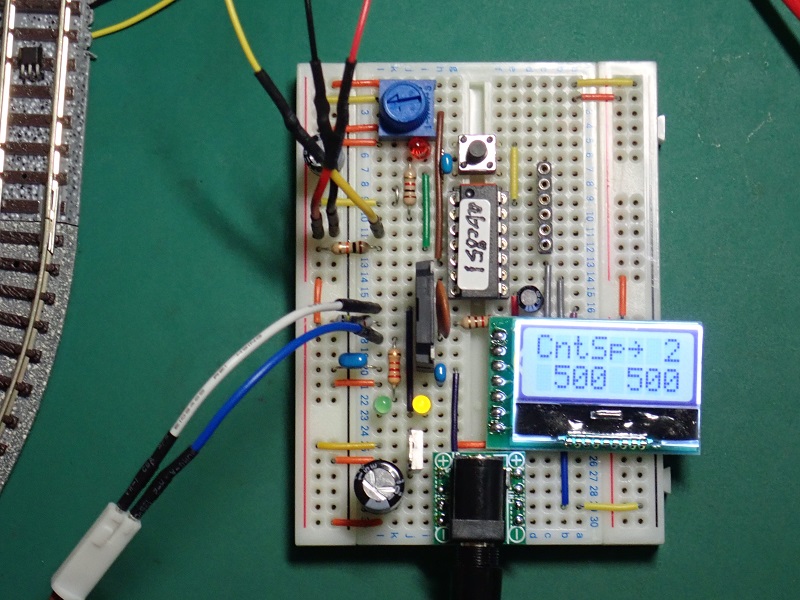
状態表示例2(定速) |
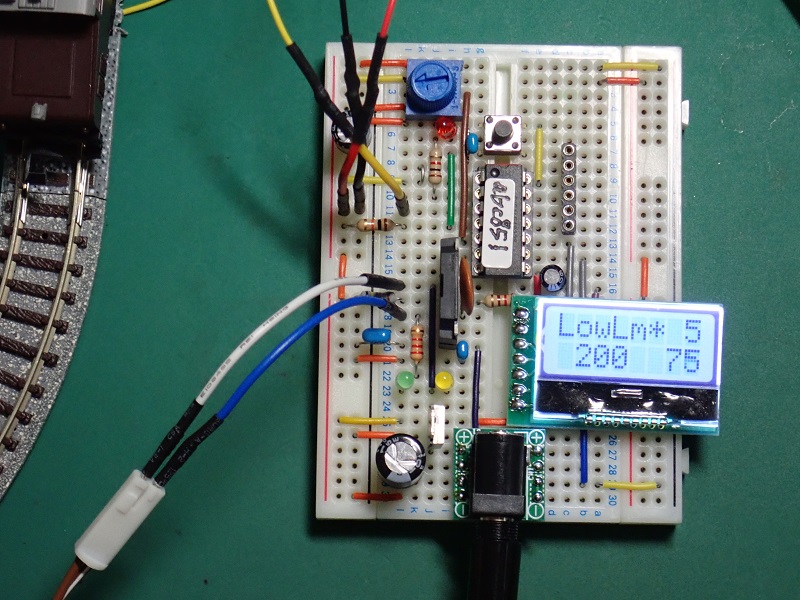
状態表示例3(停止) |
|
|
※ 本レポートの参考・利用は、あくまでも自己責任でお願いします。
 |
 |
 |