


前報(abc849)までに列車の走行制御と列車センサの動作を確認できたが、列車の常点灯を行うには、走行を開始しないPWM条件を知る必要がある。そこで、列車の走行状態やPWM出力値を表示するために、I2C接続LCD(AQM0802A)を追加した。なお、i2cのプルアップはピン設定のWPUで行った。バックライトを使う場合、変換基板の制限抵抗R3は20Ωと小さく明るすぎるので、別途100Ωの抵抗を使用した。
併せて、センサー入力を最大4チャンネルに拡張できるよう、試作回路も変更した。なお、RA0,1にセンサを接続する時はICSP接続を外すこと(1kΩ程度の抵抗を介して入力することも出来るが)また、誤動作を防ぐため、使用しないセンサ入力ポートは入力に設定しないか、GNDに接続すること。
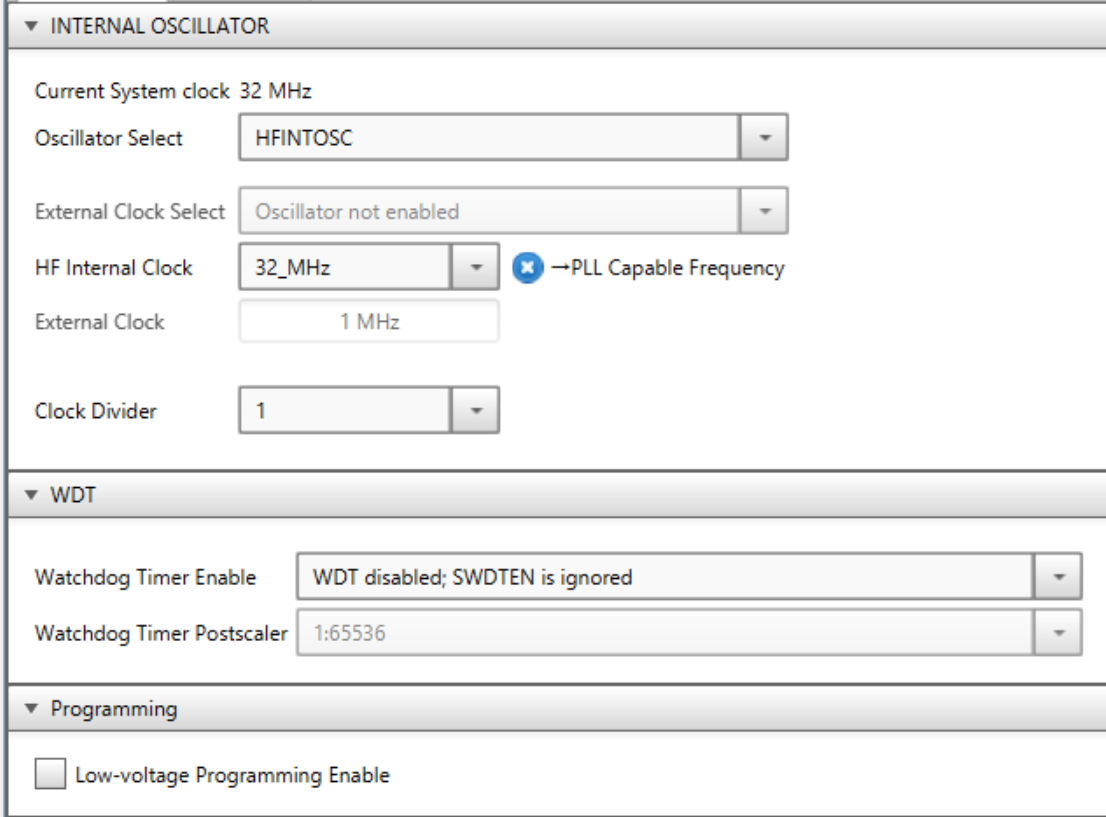
回路設計の変更に伴い、センサ入力を全てRAポートに割り当てるため、VR入力はRC5に変更した。今回はRA0、RA1、RA2のセンサー入力を使用していない。また、進行方向指示スイッチは省略し、RA3のリセットスイッチを汎用入力とし、方向スイッチ(Ps_A3)を押すたびに進行方向を変える仕様に変更した(Ps_A3スイッチは緊急停止スイッチとしても使える)。なお、RA3(MCLR)を汎用ポートとして使うにはLow-VoltageProguramingのチェックをつけないこと。
LCD表示ライブラリはabc840のi2cLCD_AQM0802A.cおよびヘッダーファイルで。I2C_..をI2C1_..に変更し、これをライブラリとして用いた(詳細および使い方はabc840を参照)。
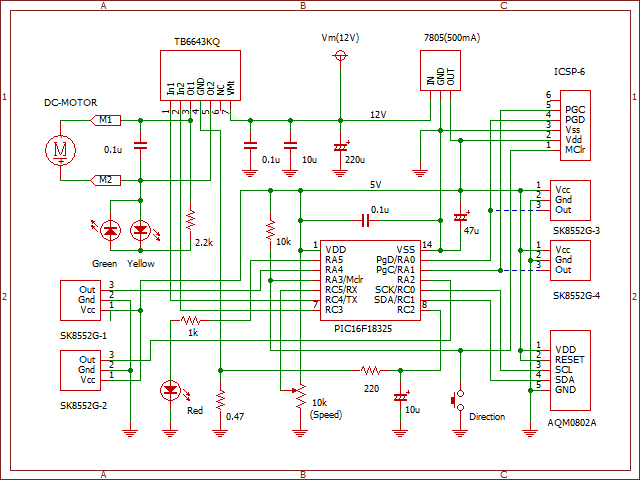
LCD表示機能付きパワーパック回路 (PIC16F18325) |

MCC PinModule (ここで状態変化割り込みを設定) |
★MCCの設定 (その他の設定はdefaultのまま)
|
System_Module 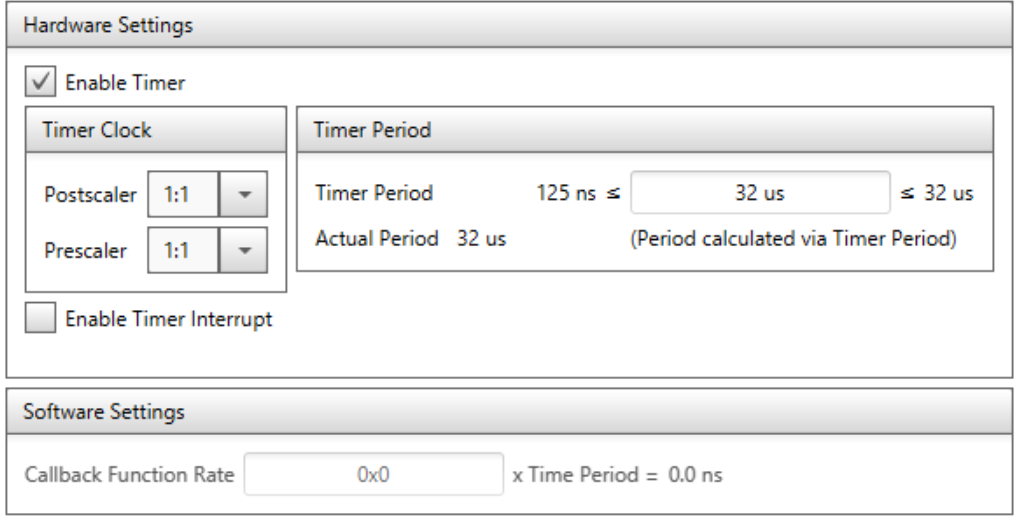
TMR2 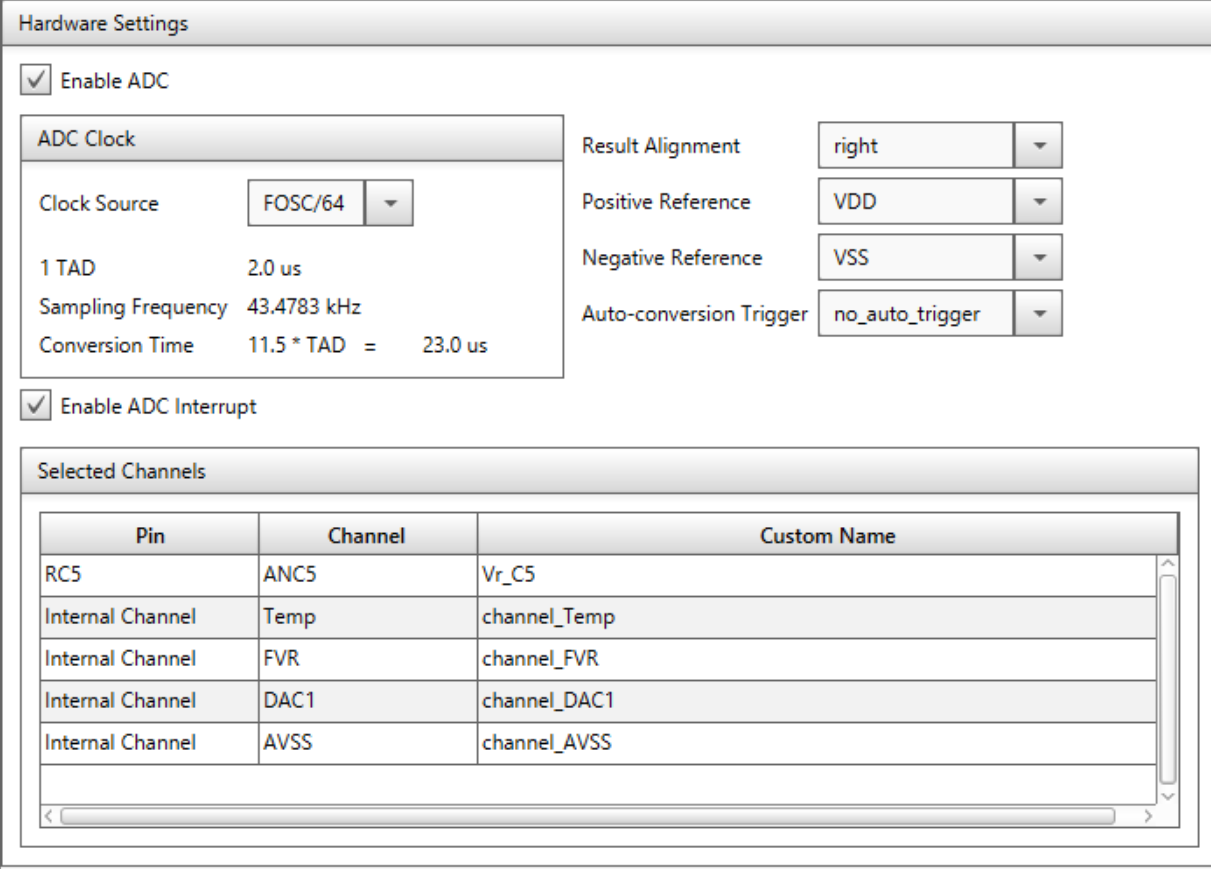
ADC 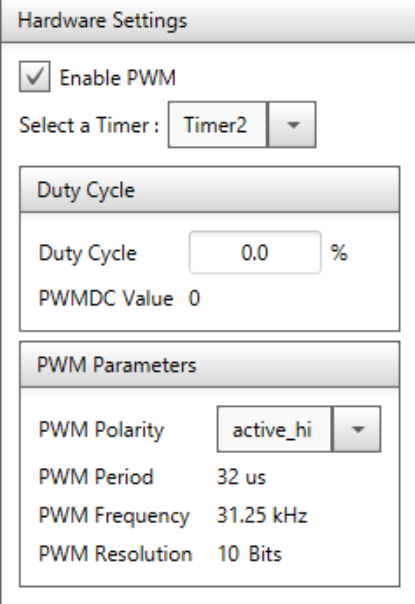
PWM5 
FVR 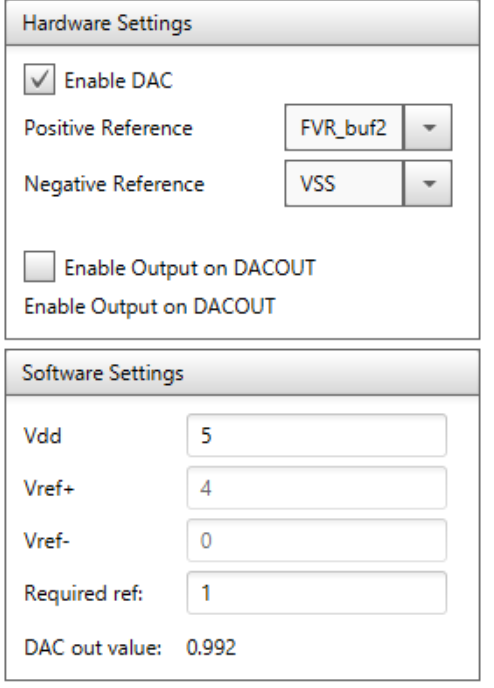
DAC1 
CMP1 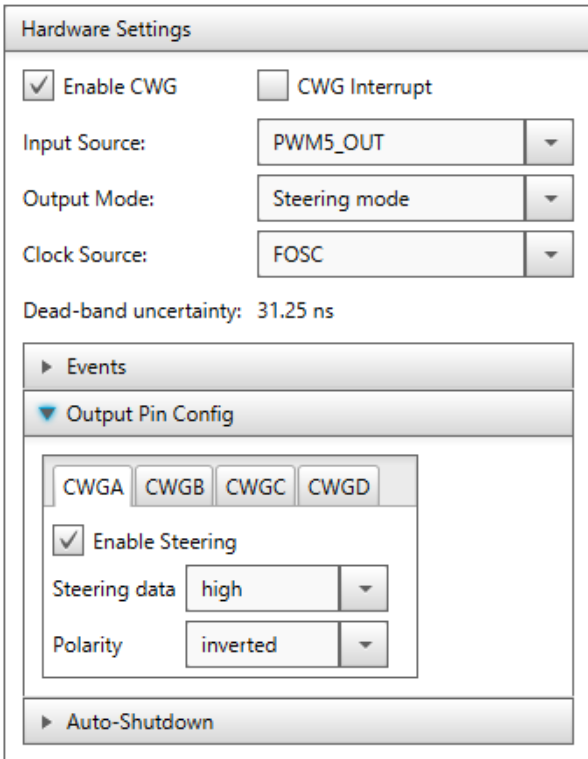
CWG1 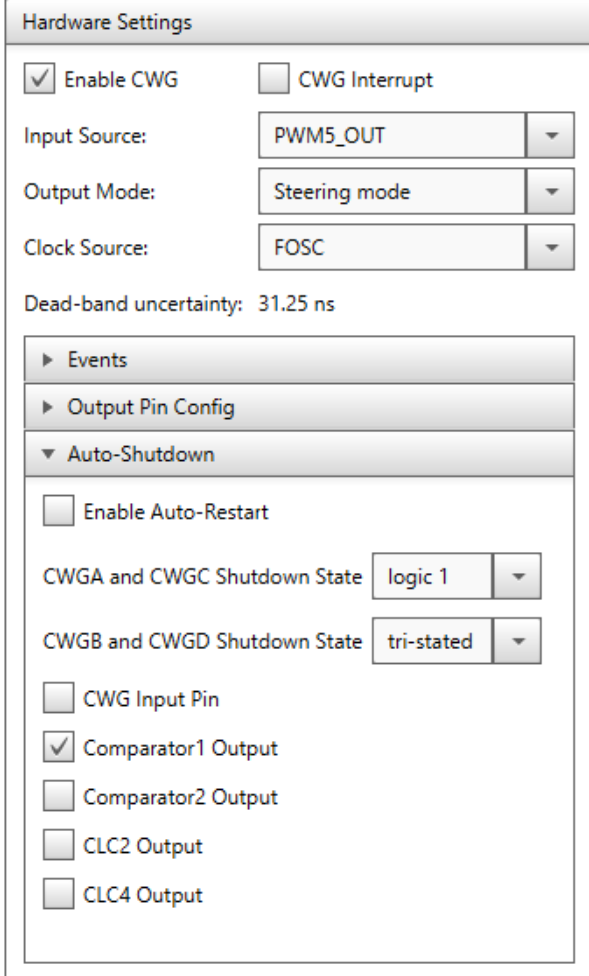
CWG1(shutdown) 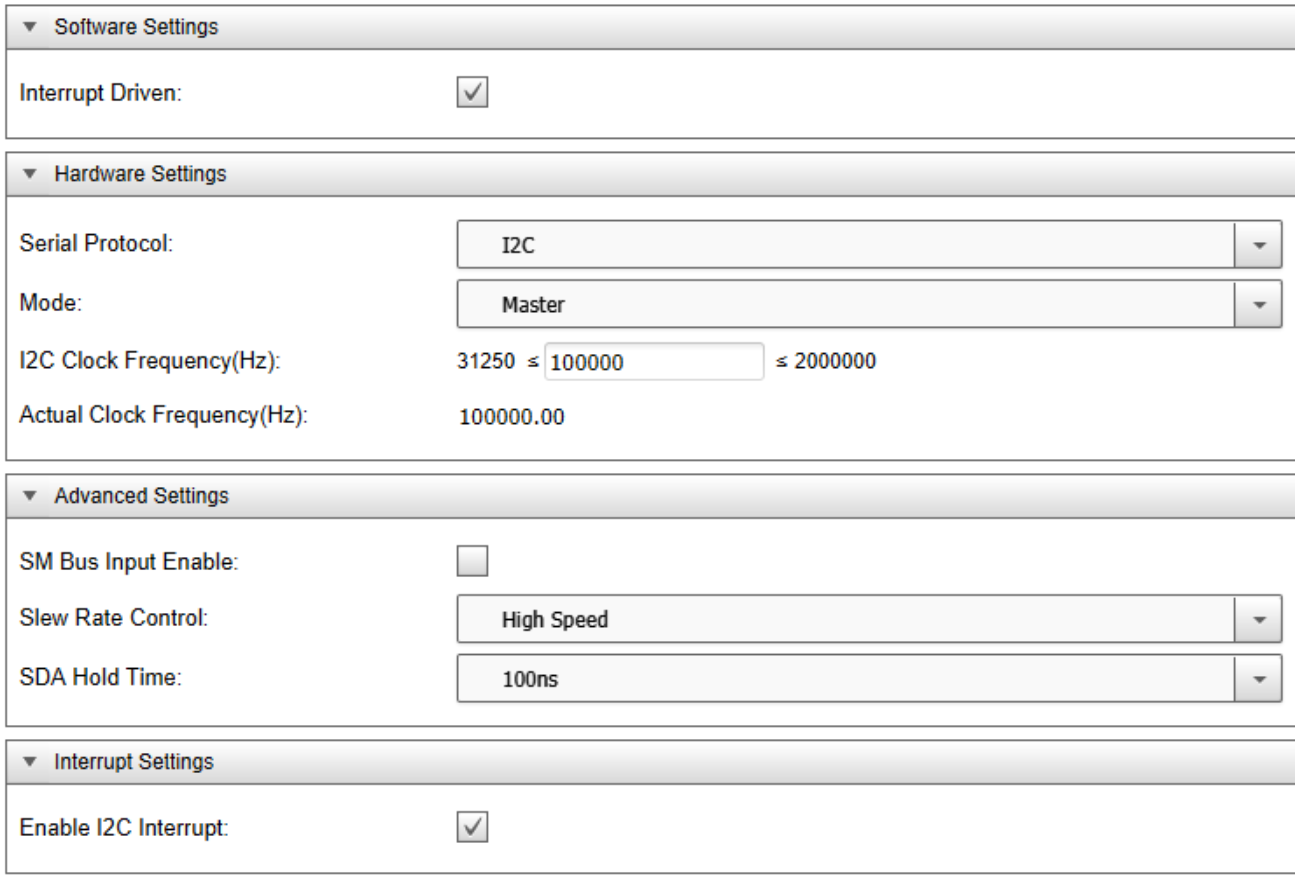
MSSP |
|
|
|
| ||
|
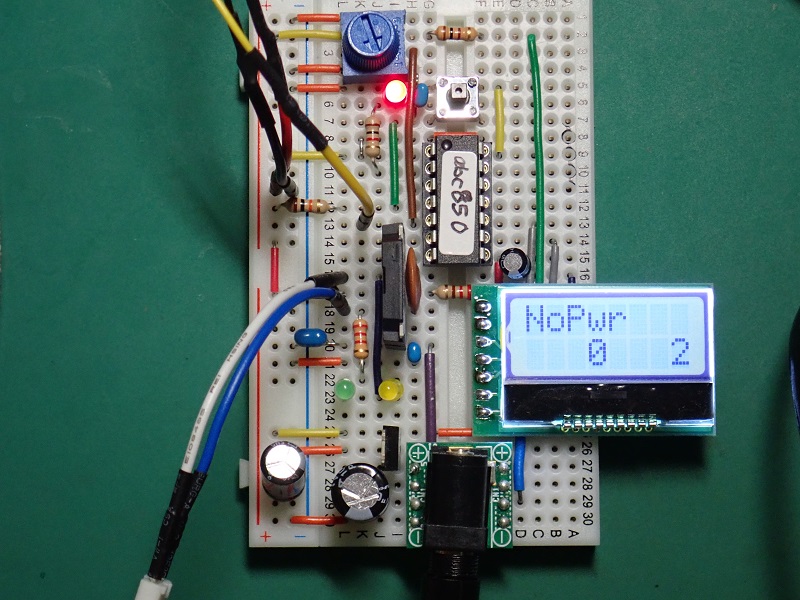
電源投入時の試作回路 (NoPwr、赤LED点灯) |
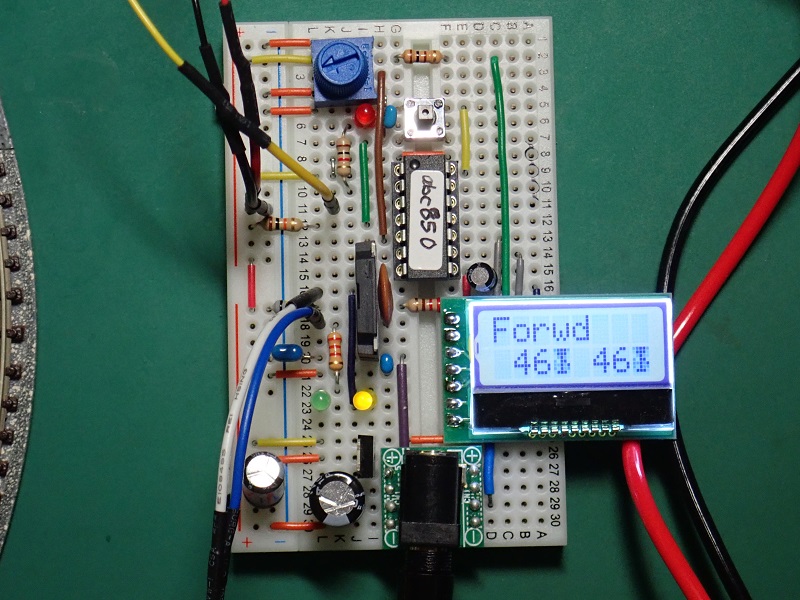
列車走行時の試作回路 (Forwd、黄LED点灯) |

列車走行テスト風景 |
PWMの幅の指定は0~1023(10ビット)なので、LCD表示される数値はフルパワーのほぼ0.1%単位表示と見なせる。
ちなみに、走行試験に用いたBトレインでは、約350(0.35×12V=4.2V)を超えると走行を開始し、250~300(3~3.6V)まで下げると停止した。
PICなどのデータシートや機器のマニュアルを、abc841で紹介した「瞬間テキスト」とグーグル翻訳で日本語化しWordファイルとしているが、図や表があると、ページ内のレイアウトが乱れることが多い。
そこで、レイアウトを維持したままPDFファイルを読み取ることが出来るOCRソフトを利用することにした。今まで、OCRソフトはイロイロ試しており、文字読み取り精度が良くないものが普通と感じていた。ネットで調べていると、英文読取りに優れていると言われる「読取り革命16」(6,980円、DL割引版)が見つかった。さらにグーグル翻訳とも連携している。そこで、あまり期待せずにポチり。
実際に使ってみると、さすがに英文の読み取りはほぼ完璧だが、領域の認識がイマイチ。領域を設定し直すと、英語だけでなく日本語も含めてほぼ満足できる読取りができた。領域の再設定は意外と手間がかかるので、この部分の改良を期待する(罫線無し表形式が指定できると・・)。
その後、英文を日本語にグーグル翻訳で翻訳すると、チョットおかしい翻訳をする場合もあるが、専門用語や記号が混じっている場合でも、それなりに変換できているようである。翻訳後の日本語が長くなる場合には、領域をはみ出して見えなくなるので、領域が自動で拡大されるとうれしい。
ソフトのほとんどの機能はマウス操作なので、キーボードによるショートカットで操作が出来るとありがたいのだが・・。
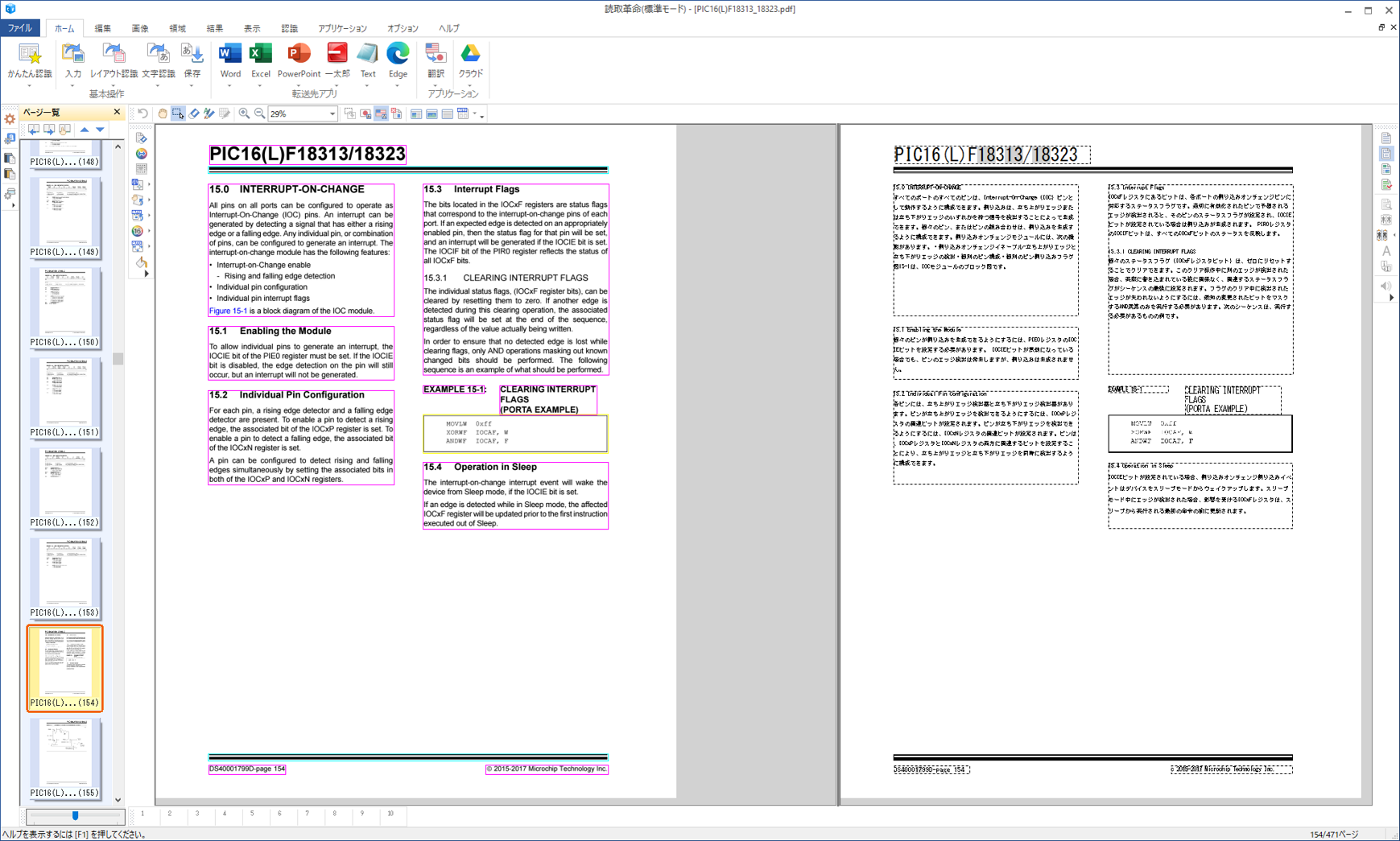
読取り革命ver.16の画面例(PIC16F1813マニュアル、英文翻訳後) |
※ 本レポートの参考・利用は、あくまでも自己責任でお願いします。
 |
 |
 |