俹 PIC儈僯BB僔儕乕僘(23)丂丂乣USB愙懕偱PIC傪3.3V偱巊偆
倐倷丂倖倞倠
丂崱傑偱丄PIC偼USB愙懕5V摦嶌偱丄3.3V怣崋偑昁梫側偲偒偼丄怣崋儗儀儖曄姺僨僶僀僗傪巊偭偰偄偨偑丄儗儀儖曄姺僨僶僀僗偵傛偭偰偼摦嶌偑晄埨掕偵側傞偙偲偑偁偭偨丅摿偵丄SPI愙懕僨僶僀僗偼3.3V摦嶌偺暔偑懡偄偺偱丄PIC傪3.3V偱摦嶌偝偣傞偲丄儗儀儖曄姺僨僶僀僗偑晄梫偲側傞丅
丂USB愙懕儐僯僢僩偺僔儕傾儖怣崋偵偼3.3V偲5V偺儌僲偑偁傝丄2庬椶偺儐僯僢僩傪僥僗僩偟偨丅傑偨丄USB儐僯僢僩偐傜3.3V揹尮偑嫙媼偱偒傞傕偺傕偁傞偑丄奼挘惈傪峫椂偡傞偲暿搑3.3V偺揹尮偑昁梫丅傕偟丄USB僶僗僷儚乕亄嶰抂巕儗僊儏儗乕僞傪棙梡偡傞応崌丄USB儐僯僢僩偐傜5V傕庢傝弌偣傞偙偲丅
亂僴乕僪亃
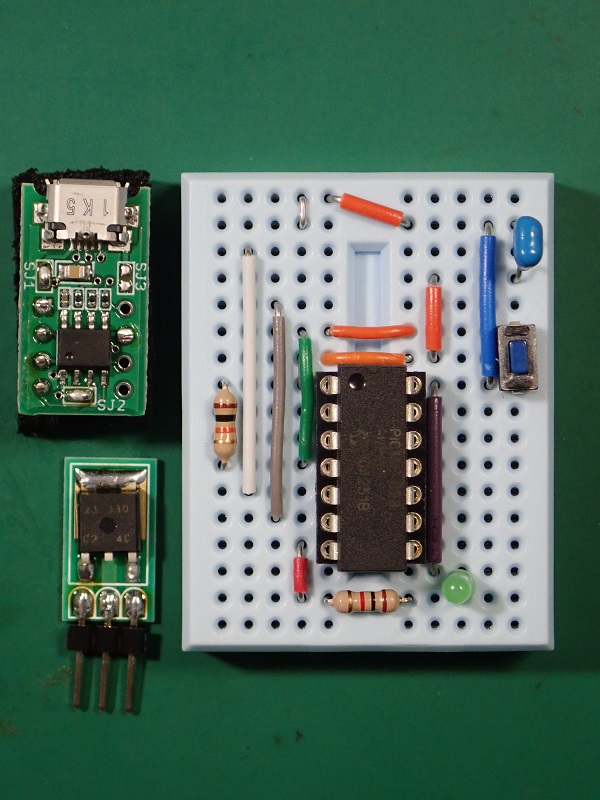
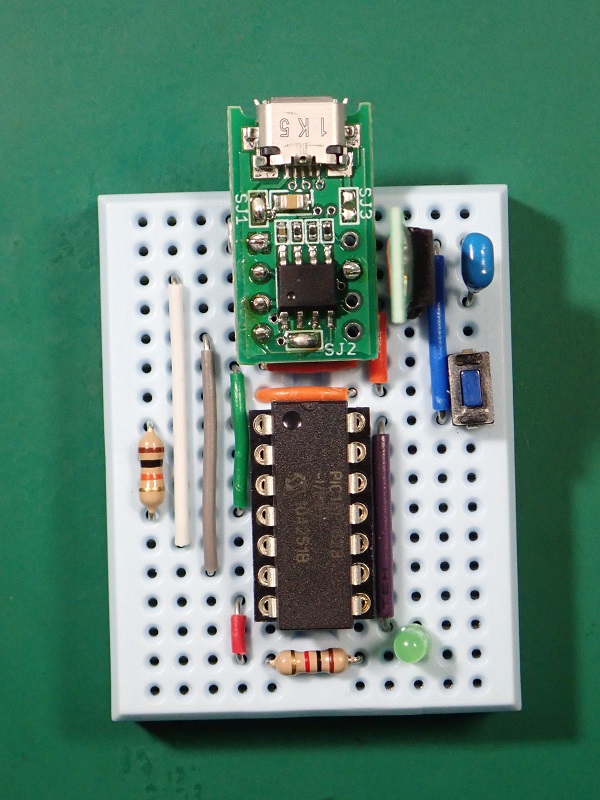
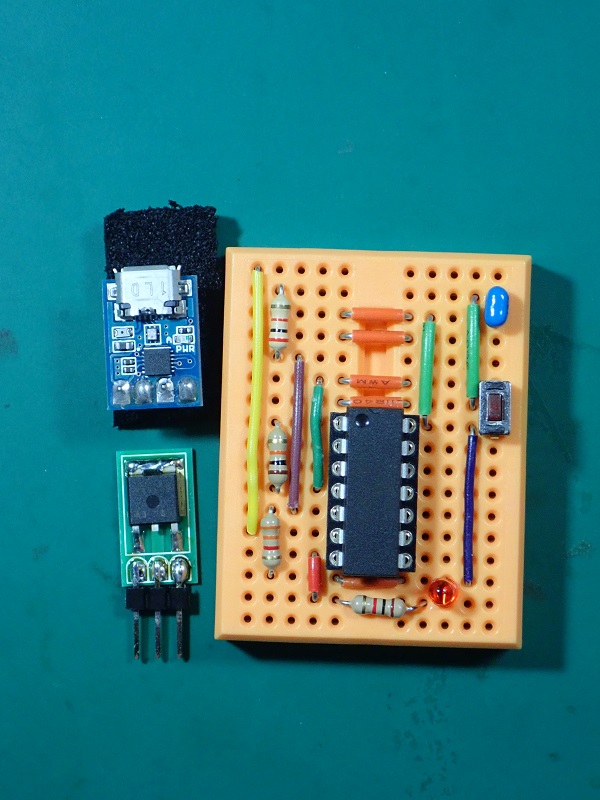
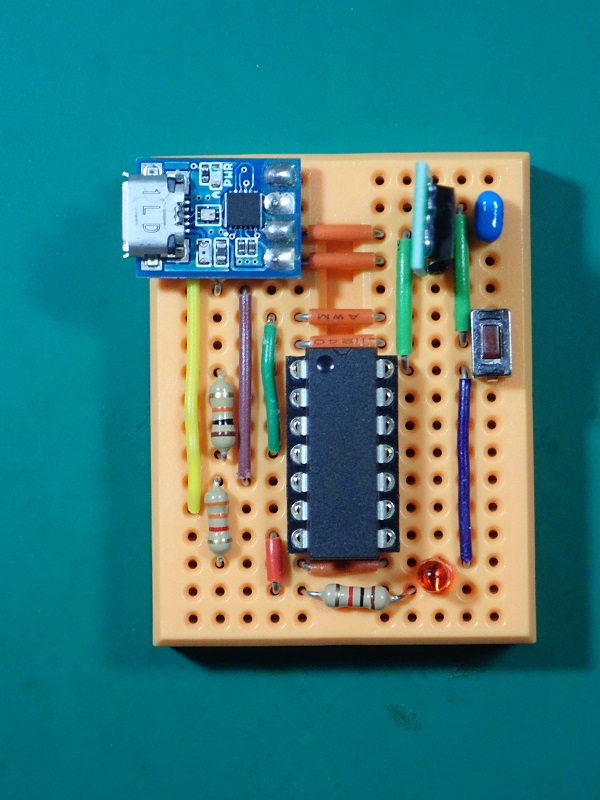
- PIC偼庤帩偪偺PIC16F1823/25丄PIC摦嶌妋擣偺偨傔掞峈(1k兌)傪夘偟偰LED傪RC3偵愙懕丅
- 嶰抂巕儗僊儏儗乕僞偺僷僢働乕僕偼TO252-3偱丄TO-252曄姺婎斅(#109075丄@50乯傕巊梡
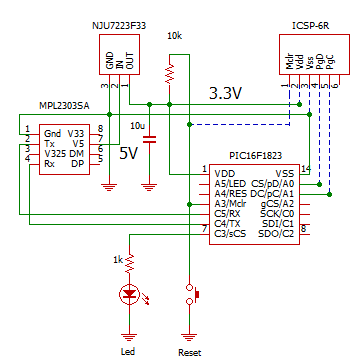
嘆 3.3V弌椡僔儕傾儖偺USB儐僯僢僩 乵#斣崋偼廐寧揹巕乶
- 丂丒USB僔儕傾儖曄姺儌僕儏乕儖丗
- MPL2303SA(儅儖僣丄@894乯
5丆6丆8斣抂巕偵偼僺儞傪庢晅偗側偄
- 丂丒嶰抂巕儗僊儏儗乕僞丗
- NJU7223DL1(3.3V/500mA丄#103705丄@180乯
抂巕暲傃偵拲堄両(GND偑拞墰偱柍偄乯
- PL2303SA偼僪儔僀僶乕偺僀儞僗僩乕儖偑昁梫偲偁偭偨偑丄win10(22H2)偱愙懕偟偰傒傞偲丄帺摦偱僪儔僀僶乕偑僀儞僗僩乕儖偝傟丄栤戣側偔愙懕弌棃偨丅
-
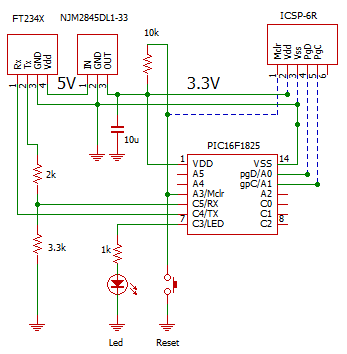
嘇 5V弌椡僔儕傾儖偺USB儐僯僢僩丂乵#斣崋偼廐寧揹巕乶
- 丂丒USB僔儕傾儖曄姺儌僕儏乕儖丗
- FT234X(#108461丄@780乯
- 丂丒嶰抂巕儗僊儏儗乕僞丗
- NJM2845DL1-33(3.3V/800mA丄#111299丄@50)
- USB儐僯僢僩偺Rx擖椡偼PIC偺Tx偑3.3V偱傕OK側偺偱丄偦偺傑傑愙懕丅USB儐僯僢僩偺Tx怣崋偼2偮偺屌掕掞峈偱揹埑傪栺3.1V偵暘埑偟偰PIC偺Rx偵愙懕偟偨丅
-
亂僜僼僩亃丂嘆傕嘇傕摨偠
丒MCC偺愝掕
-
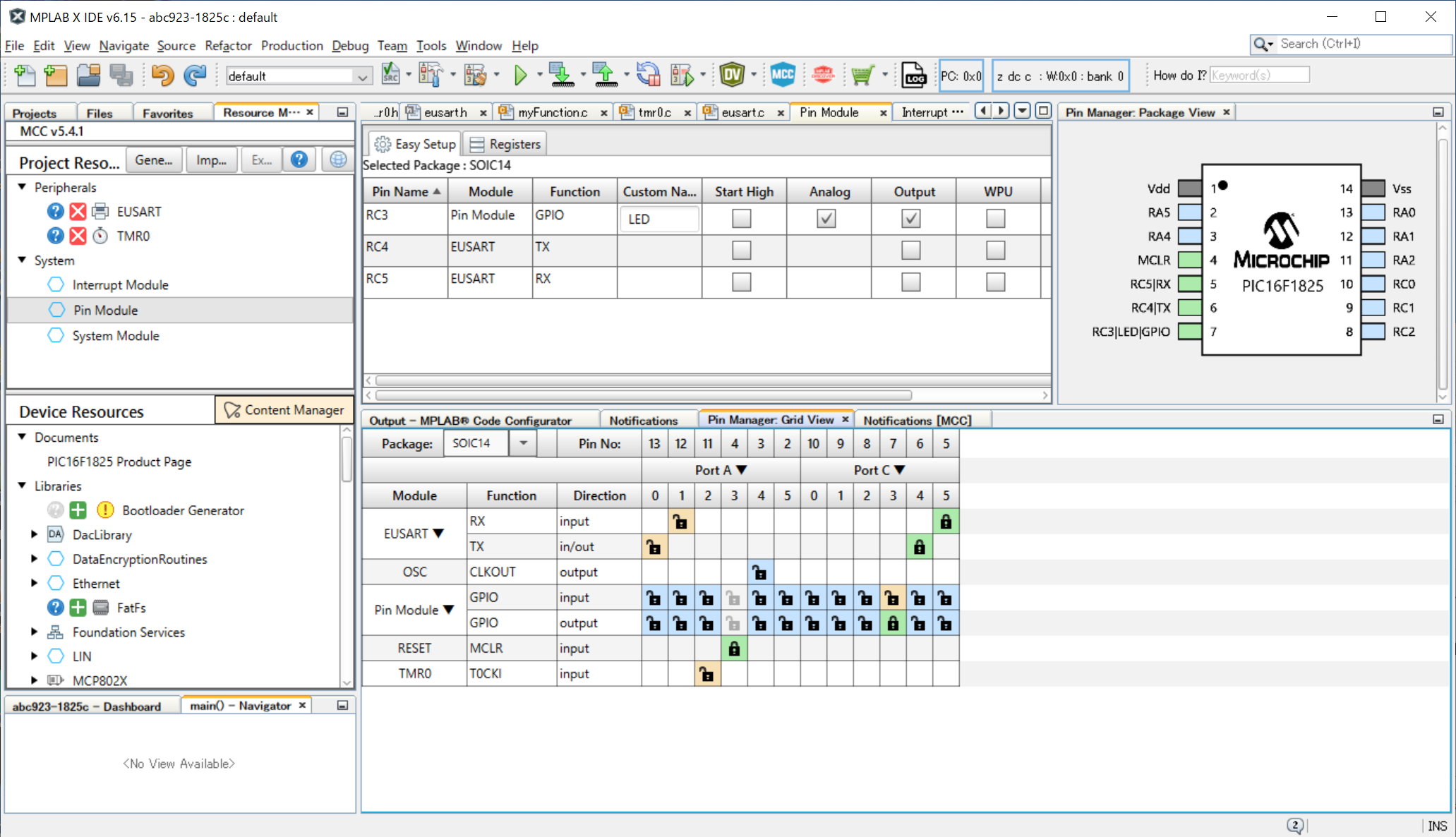
system module (INTOSC偱16MHz)
丂
|
-
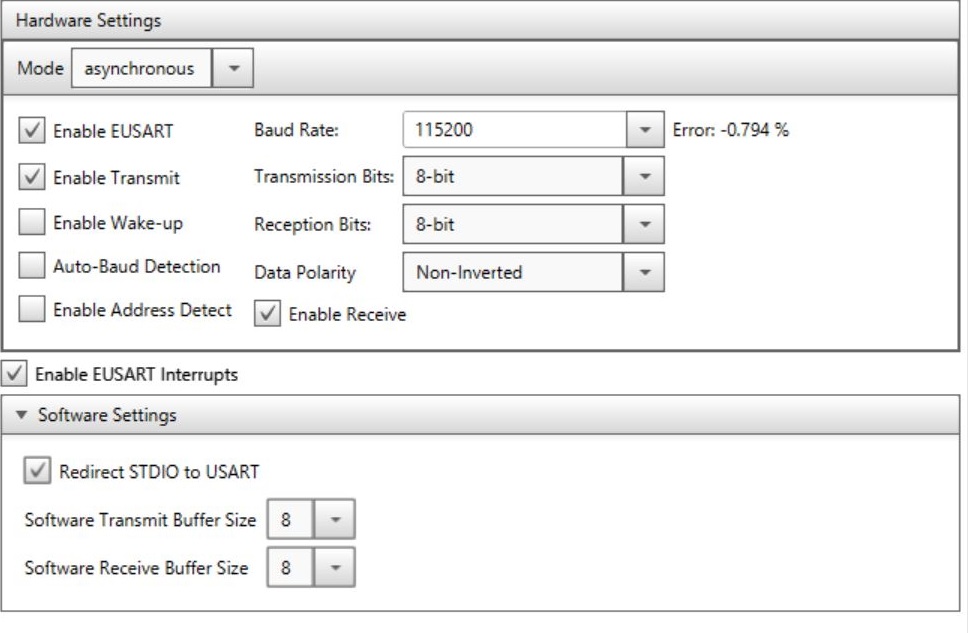
EUSART 乮115200bps)
丂
|
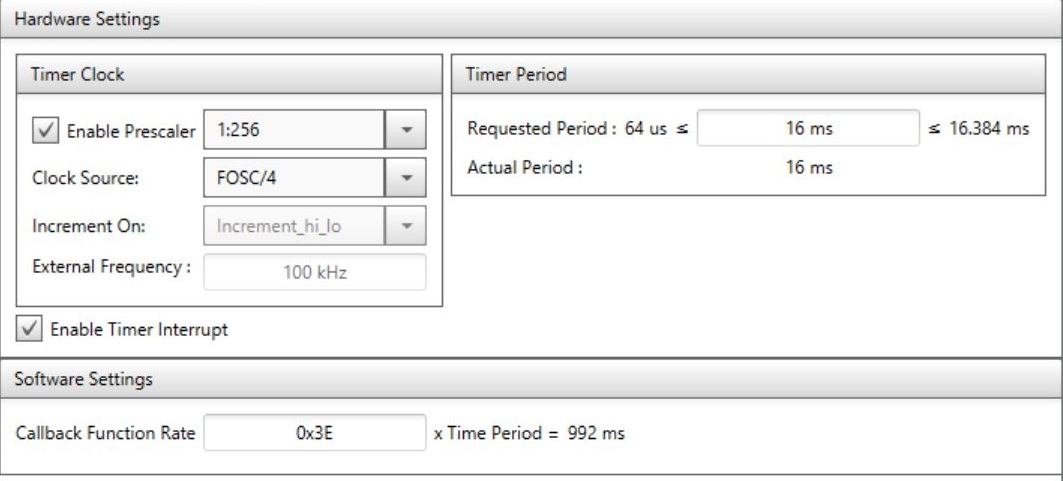
TMR0 (栺侾昩枅偺妱傝崬傒偱LED揰柵乯
丂
|
 亂abc923-1823/25.c亃 abc923-1825.c (zip) 乵1823.c傕摨偠乶
亂abc923-1823/25.c亃 abc923-1825.c (zip) 乵1823.c傕摨偠乶
/*****************************(abc923-1823/25.c)****
* PIC Test 乮3.3V Power乯
****************************************************/
#include "mcc_generated_files/mcc.h"
#include "myProject.h"
//--- 僞僀儅乕丒斈梡曄悢
char Msg[20]; // 僐儊儞僩摍憲怣梡暥帤楍
uint8_t TFlg; // 僞僀儅乕僼儔僌
//---- EUSART梡曄悢
char RBuf[EU_BFSIZE]; // 僔儕傾儖庴怣僶僢僼傽乕
uint8_t SFlg; // 僔儕傾儖庴怣僼儔僌
/***************************************
* 僞僀儅0 Callback娭悢 (1昩廃婜妱傝崬傒)
***************************************/
void TMR0_Process(void){
TFlg = 1; // 僞僀儅乕僼儔僌僙僢僩
}
/***************************************
* Main application
***************************************/
void main(void){
char cmd;
SYSTEM_Initialize();
// 僞僀儅0 Callback娭悢掕媊
TMR0_SetInterruptHandler(TMR0_Process);
INTERRUPT_GlobalInterruptEnable();
INTERRUPT_PeripheralInterruptEnable();
EU_Puts("--- test ---");
LED_SetHigh();
while (1) {
// 1昩廃婜偺張棟
if(TFlg){ // 僼儔僌僆儞偺応崌
LED_Toggle();
TFlg = 0; // 僼儔僌儕僙僢僩
}
// 僐儅儞僪張棟
if(SFlg){ // 庴怣偁傝偺応崌
cmd = RBuf[0];
EU_Write("Input = ");
EU_Puts(RBuf);
SFlg = 0;
}
}
}
/*** End of File ***/
|
丒僔儕傾儖捠怣梡乮mcc_generated_files/eusart.c偵2峴傪捛壛乯
亂eusart.c亃
/***** 乮mcc_generated_files/eusart.c 乯****
* 僔儕傾儖捠怣丂乮愒帤偺晹暘傪捛壛乯
*********************************************/
#include "eusart.h"
#include "../myProject.h"
丒丒丒丒亙搑拞徣棯亜丒丒丒丒
void EUSART_Receive_ISR(void)
{
eusartRxStatusBuffer[eusartRxHead].status = 0;
if(RCSTAbits.FERR){
eusartRxStatusBuffer[eusartRxHead].ferr = 1;
EUSART_FramingErrorHandler();
}
if(RCSTAbits.OERR){
eusartRxStatusBuffer[eusartRxHead].oerr = 1;
EUSART_OverrunErrorHandler();
}
if(eusartRxStatusBuffer[eusartRxHead].status){
EUSART_ErrorHandler();
} else {
EUSART_RxDataHandler();
}
// or set custom function using EUSART_SetRxInterruptHandler()
myEusart();
}
丒丒丒亙埲屻徣棯亜丒丒丒
|
丒僆儕僕僫儖儔僀僽儔儕乕丂
亂myFunction.c亃 myFunction.c + myProject.h(zip)
********************(myFunction.c)******
* 帺嶌斈梡娭悢
****************************************/
#include
#include "myProject.h" // #define EU_BFSIZE
/*** EUSART僔儕傾儖娭悢梡 ********************/
extern char RBuf[]; // 庴怣暥帤Buffer
extern uint8_t SFlg; // 庴怣僼儔僌
static uint8_t sIdx = 0; // 庴怣暥帤楍Index
/*--- Eusart庴怣妱傝崬傒僴儞僪儔乕 -------------
* eusrt.c偺EUSART_Recive_ISR偵捛壛偡傞偙偲
*---------------------------------------------*/
void myEusart(){
char ch;
ch = EUSART_Read();
#if ECHO == ON
EUSART_Write(ch);
#endif
if((ch == 0x0a)||(ch == 0x0d)){ // 夵峴張棟
RBuf[sIdx] = 0;
sIdx = 0;
SFlg = 1;
}else if((ch == 0x08)&&(sIdx > 0)){ // BS張棟
sIdx--;
}else{
if(sIdx < EU_BFSIZE) RBuf[sIdx++] = ch;
}
}
/*--- Eusart庴怣僨乕僞傪曉偡--------------------
* *str丗庴怣僨乕僞傪奿擺偡傞暥帤楍
* RETURN丗庴怣偟偨暥帤悢乮[0]側傜僨乕僞柍偟乯
*---------------------------------------------*/
/*uint8_t EU_gets(char *str){
strcpy(str,rBuf);
return strlen(rBuf);
}
*/
/*--- Eusart傊暥帤楍傪憲怣 ---------------------
* *str丗憲怣偟偨偄暥帤楍僨乕僞
*---------------------------------------------*/
void EU_Write(char *str){
while(*str != 0){ // 暥帤楍廔傝傑偱
EUSART_Write(*str++); // 1暥帤憲怣
}
}
/*--- Eusart傊夵峴傪憲怣 ----------------------*/
void EU_Write_CR(void){
EUSART_Write('\n');
}
/*--- Eusart傊暥帤楍憲怣乮夵峴晅乯--------------
* *str丗憲怣偟偨偄暥帤楍僨乕僞
*---------------------------------------------*/
void EU_Puts(char *str){
EU_Write(str);
EU_Write_CR();
}
/*** 暥帤楍曄姺娭悢 **************************/
/*---- 16恑暥帤楍傪10恑悢偵曄姺[=xtoi()/C90]----
* *str丗10恑悢偵曄壔偟偨偄16恑悢暥帤楍
* RETURN丗曄姺偝傟偨32價僢僩晞崋柍偟惍悢
*---------------------------------------------*/
uint32_t my_xtol(char *str){
uint32_t dec;
dec = strtoul(str,NULL,16);
return (uint32_t)dec;
}
/*--- 壓埵係價僢僩傪16恑悢暥帤偵曄姺 ------------
* n丗晞崋柍偟16bit惍悢乮嵟壓埵偺4bit偺傒桳岠乯
* RETURN丗16恑悢偵懳墳偡傞傾僗僉乕暥帤
*---------------------------------------------*/
uint8_t my_utoa2(uint16_t n){
n &= 0x0F;
if(n < 10) return '0'+ (uint8_t)n;
else return 'A'+ ((uint8_t)n - 10);
}
/*--- 1儚乕僪(16價僢僩乯傪16恑暥帤偵曄姺 -------
* *str丗曄姺寢壥傪奿擺偡傞暥帤楍
* wd 丗曄姺偟偨偄晞崋柍偟16價僢僩僨乕僞
* dg 丗16恑悢暥帤楍偺寘悢
*----------------------------------------------*/
void my_utoa(char *str, uint16_t wd, uint8_t dg){
if(dg > 3) *str++ = my_utoa2(wd >> 12);
if(dg > 2) *str++ = my_utoa2(wd >> 8);
if(dg > 1) *str++ = my_utoa2(wd >> 4);
*str++ = my_utoa2(wd);
*str = '\0';
}
/*--- 暥帤楍傪媡弴偵擖懼 -----------------------
* *str丗暥帤弴傪擖傟懼偊偨偄暥帤楍
*-----------------------------------------------*/
void reverseString(char *str) {
uint8_t i, length;
length = (uint8_t)strlen(str);
for (int i = 0; i < length / 2; i++) {
char temp = str[i];
str[i] = str[length - 1 - i];
str[length - 1 - i] = temp;
}
}
/*--- 10恑悢暥帤楍曄姺乮壓埵偐傜曄姺乯----------
* *str丗曄姺寢壥傪奿擺偡傞暥帤楍
* wd 丗曄姺偟偨偄晞崋柍偟16價僢僩僨乕僞
*-----------------------------------------------*/
void my_itoa2(char *str, uint16_t wd){
uint8_t i;
for(int i = 0; i < 6; i++){
*str++ = '0' + (wd % 10);
wd = wd / 10;
if(wd == 0) break;
}
*str = '\0';
}
/*--- 10恑悢暥帤楍曄姺 -------------------------
* *str丗曄姺寢壥傪奿擺偡傞暥帤楍
* wd 丗曄姺偟偨偄晞崋柍偟16價僢僩僨乕僞
*-----------------------------------------------*/
void my_itoa(char *str, uint16_t wd){
my_itoa2(str, wd);
reverseString(str);
}
/******* End of File ********/
|
丂
/*********************************(myProject.h)*****
* 僾儘僕僃僋僩屄暿忦審巜掕僼傽僀儖 亂嫮壔斉亃 *
* 乮main.c偲摨偠僼僅儖僟乕偵嶌惉乯 *
***************************************************/
#include "mcc_generated_files/mcc.h"
#include "string.h"
#define ON 1
#define OFF 0
/***** PIC揹尮揹埑 ***********************/
//--- VCC愰尵柍偟偼5V乮VCC亖50偲摨偠乯
//#define VCC 50 / 揹尮揹埑偼5V
#define VCC 33 // 揹尮揹埑偼3.3V
/***** EUSART儌僕儏乕儖 *******************/
#define EU_BFSIZE 40
//--- ECHO愰尵柍偟偼僄僐乕桳傝(ECHO ON偲摨偠)
#define ECHO ON // 僄僐乕桳傝
//#define ECHO OFF // 僄僐乕柍偟
/*=== Eusart庴怣妱傝崬傒僴儞僪儔乕 ==============
* eusrt.c偺EUSART_Recive_ISR偵捛壛偡傞偙偲
*---------------------------------------------*/
void myEusart();
/*=== 暥帤楍僔儕傾儖弌椡娭悢 ===*/
//--- Eusart傊暥帤楍憲怣
/* *str丗 弌椡偡傞暥帤楍
* --------------------------- */
void EU_Write(char *str);
//--- Eusart傊夵峴傪憲怣
void EU_Write_CR(void);
//--- Eusart傊暥帤楍憲怣乮夵峴晅乯
/* *str丗 弌椡偡傞暥帤楍
* --------------------------- */
void EU_Puts(char *str);
/****** Delay Macros ********/
#define __delay_us(x) _delay((uint32_t)((x)*(_XTAL_FREQ/4000000.0)))
#define __delay_ms(x) _delay((uint32_t)((x)*(_XTAL_FREQ/4000.0)))
/*** 帺嶌斈梡娭悢 *******/
/*== 暥帤楍曄姺娭悢 ===========*/
//---- 16恑暥帤楍傪10恑悢偵曄姺
uint32_t my_xtol(char *str);
//--- 16恑悢乮晧崋柍偟乯傪暥帤楍偵曄姺
void my_utoa(char *str, uint16_t wd, uint8_t dg);
//--- 10恑悢(晞崋柍偟乯傪暥帤楍偵曄姺
void my_itoa(char *str, uint16_t wd);
/******* End of File ********/
|
仸僾儘僌儔儉偺儕僗僩傪僴僀儔僀僩晅偒偺僗僞僀儖偱尒傞応崌偼偙偙傪僋儕僢僋
仸 杮儗億乕僩偺嶲峫丒棙梡偼丄偁偔傑偱傕帺屓愑擟偱偍婅偄偟傑偡丅
 丂
丂
 丂
丂
 丂
丂