 丂
丂
 丂
丂
 丂
丂
 丂
丂
丂
丂
丂
丂
丒帺揮幵憱峴拞偵曽岦傪曄偊傞応崌丄庤怣崋(僴儞僪僒僀儞乯傪巊偭偰偄傑偡偐丠
丒曅庤塣揮偵側傞偺偱丄崌恾傪偣偢偵嬋偑偭偰偟傑偆偙偲偑偁傝傑偣傫偐丠
丒崌恾晄棜峴偱惵愗晞傪愗傜傟丄3,000墌偺敱嬥傪庢傜傟偐偹傑偣傫乮曅庤塣揮傕敱嬥丠乯丅
丂
丂偙傫側帪偵曋棙側偺偑丄乽帺揮幵梡僼儔僢僔儍乕乿偱偡丅彮側偔偲傕屻曽偵偼崌恾傪憲傟傑偡丅偟偐偟丄帺揮幵僼儔僢僔儍乕偑朄椷忋偺乽崌恾乿偲偟偰擣傔傜傟傞偐偼丄傛偔傢偐傜側偄傛偆偱偡丅偱傕丄偁偭偨曽偑椙偝偦偆偱偡偹乮慜曽偵傕昁梫偐側丠乯丅
丂偦偙偱丄Amazon偺僾儔僀儉僨乕偵乽帺揮幵 僥乕儖儔僀僩 LED亄帺揮幵梡曽岦巜帵婍 LY-6700乿乮@2,000丄杮懱丗USB廩揹幃丄娙堈杊悈丄庤尦儕儌僐儞晅乯傪峸擖偟偨丅
丂側偍丄LY-6700偼杮懱傪僑儉僶儞僪偱僔乕僩億僗僩偵庢傝晅偗傞僞僀僾偩偑丄庢晅梊掕偺帺揮幵偺億僗僩晹偵庢晅偗僗儁乕僗偑柍偐偭偨偺偱丄帺揮幵屻晹偵乽19x19捈岎僋儔儞僾乿偲乽19冇L150偺僷僀僾乿傪庢傝晅偗偨丅側偍丄僋儔儞僾偺庢晅帪偵僗儁乕僒偲偟偰乽僇僢僩偟偨19冇偺庽帀儂乕僗乿傕弨旛偟偨丅
丂僼儔僢僔儍乕傪揰摂偝偣傟偽丄椉庤偱塣揮偱偒傞偺偱曋棙偱偡丅嵍塃僼儔僢僔儍乕偼90昩屻偵偼帺摦偱徚摂偟傑偡丅廩揹帪娫偼1乣2帪娫丅摦嶌帪娫偼4乣6帪娫偲偁傝傑偡丅
丂擄揰偼擔杮岅儅僯儏傾儖偑柍偄偺偲丄儕儌僐儞偺LED偑柧傞偔側偄偺偱惏揤帪偵偼僠儑僢僩尒偯傜偄偙偲偐側丅
 LY-6700(杮懱丄儕儌僐儞丄庢晅僷乕僣摍乯 |
 庢晅梡偵暿搑弨旛偟偨儌僲 |
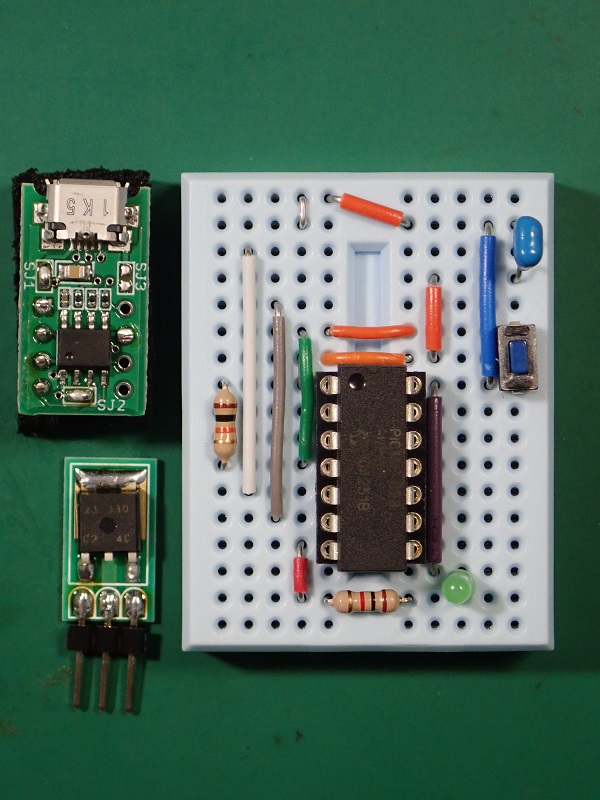
 庢晅慜偺帺揮幵 |
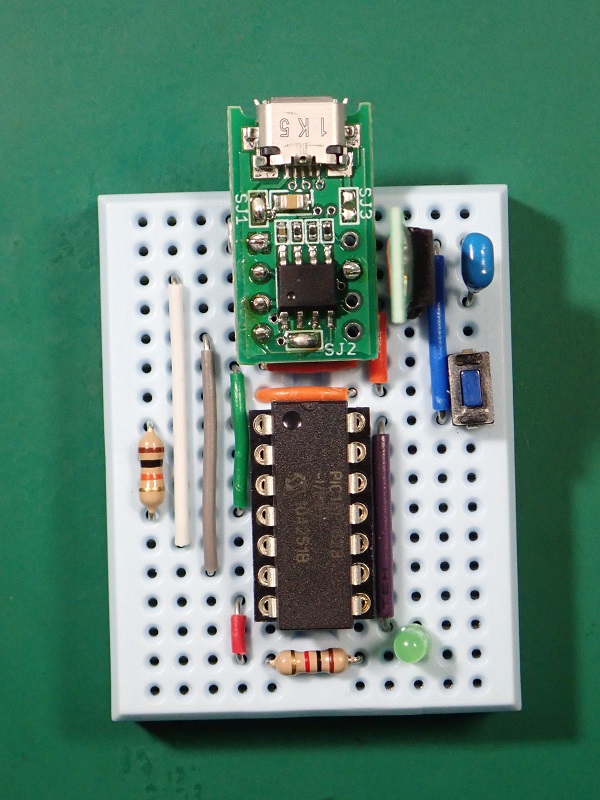
 丂  儕儌僐儞丒僷僀僾庢晅 |
 揰摂僥僗僩乮嵍塃摨帪揰柵傕壜乯 |
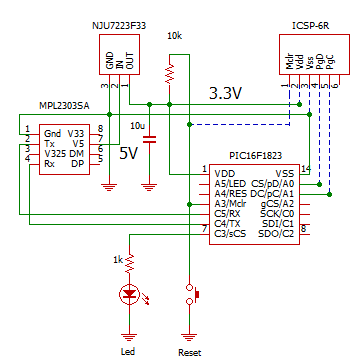
丂崱傑偱丄PIC偼USB愙懕5V摦嶌偱丄3.3V怣崋偑昁梫側偲偒偼丄怣崋儗儀儖曄姺僨僶僀僗傪巊偭偰偄偨偑丄儗儀儖曄姺僨僶僀僗偵傛偭偰偼摦嶌偑晄埨掕偵側傞偙偲偑偁偭偨丅摿偵丄SPI愙懕僨僶僀僗偼3.3V摦嶌偺暔偑懡偄偺偱丄PIC傪3.3V偱摦嶌偝偣傞偲丄儗儀儖曄姺僨僶僀僗偑晄梫偲側傞丅
丂USB愙懕儐僯僢僩偺僔儕傾儖怣崋偵偼3.3V偲5V偺儌僲偑偁傝丄2庬椶偺儐僯僢僩傪僥僗僩偟偨丅傑偨丄USB儐僯僢僩偐傜3.3V揹尮偑嫙媼偱偒傞傕偺傕偁傞偑丄奼挘惈傪峫椂偡傞偲暿搑3.3V偺揹尮偑昁梫丅傕偟丄USB僶僗僷儚乕亄嶰抂巕儗僊儏儗乕僞傪棙梡偡傞応崌丄USB儐僯僢僩偐傜5V傕庢傝弌偣傞偙偲丅
亂僴乕僪亃
嘆 3.3V弌椡僔儕傾儖偺USB儐僯僢僩 乵#斣崋偼廐寧揹巕乶
 夞楬恾 丂 |
 俛俛攝慄忬嫷 |
 俛俛攝慄姰椆 |
嘇 5V弌椡僔儕傾儖偺USB儐僯僢僩丂乵#斣崋偼廐寧揹巕乶
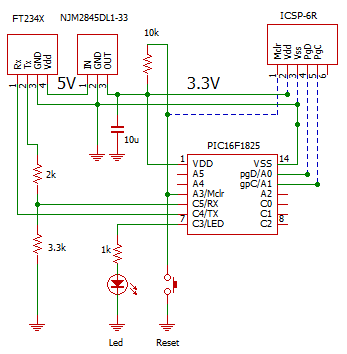 夞楬恾 丂 |
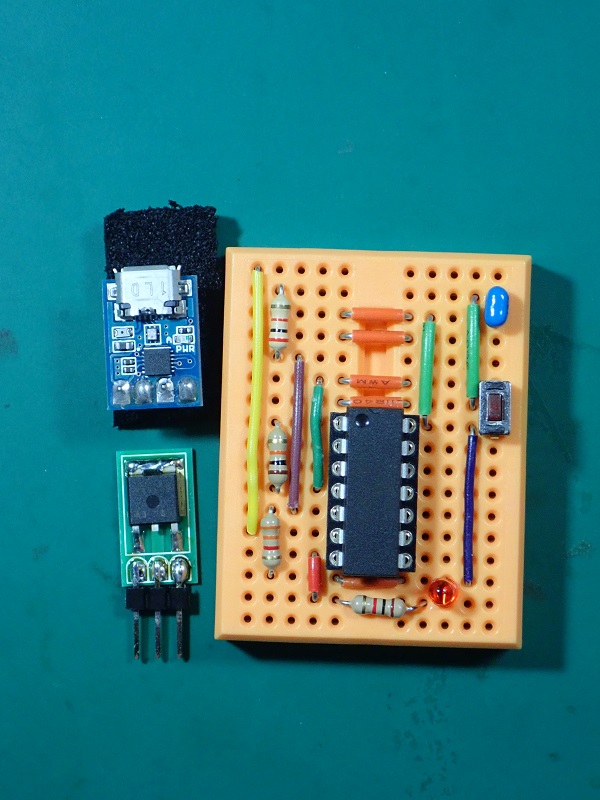 俛俛攝慄忬嫷 |
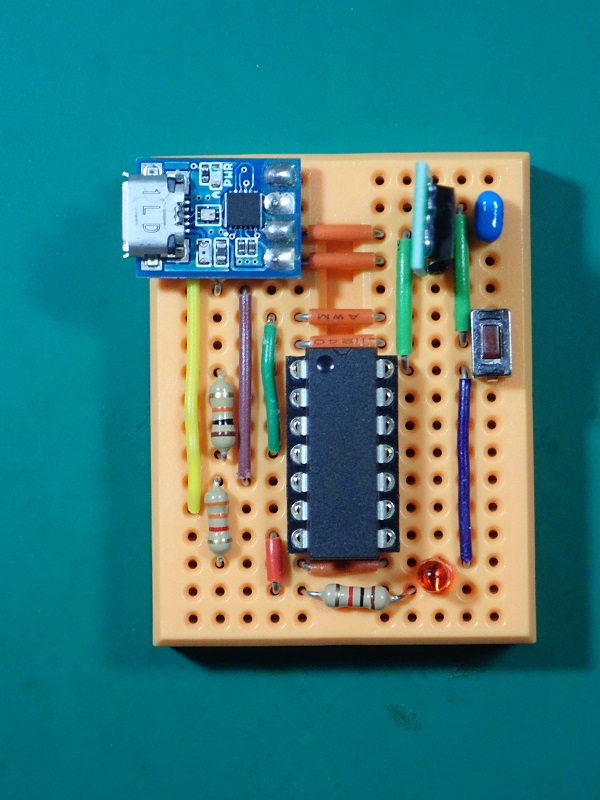 俛俛攝慄姰椆 |
亂僜僼僩亃丂嘆傕嘇傕摨偠
丒MCC偺愝掕
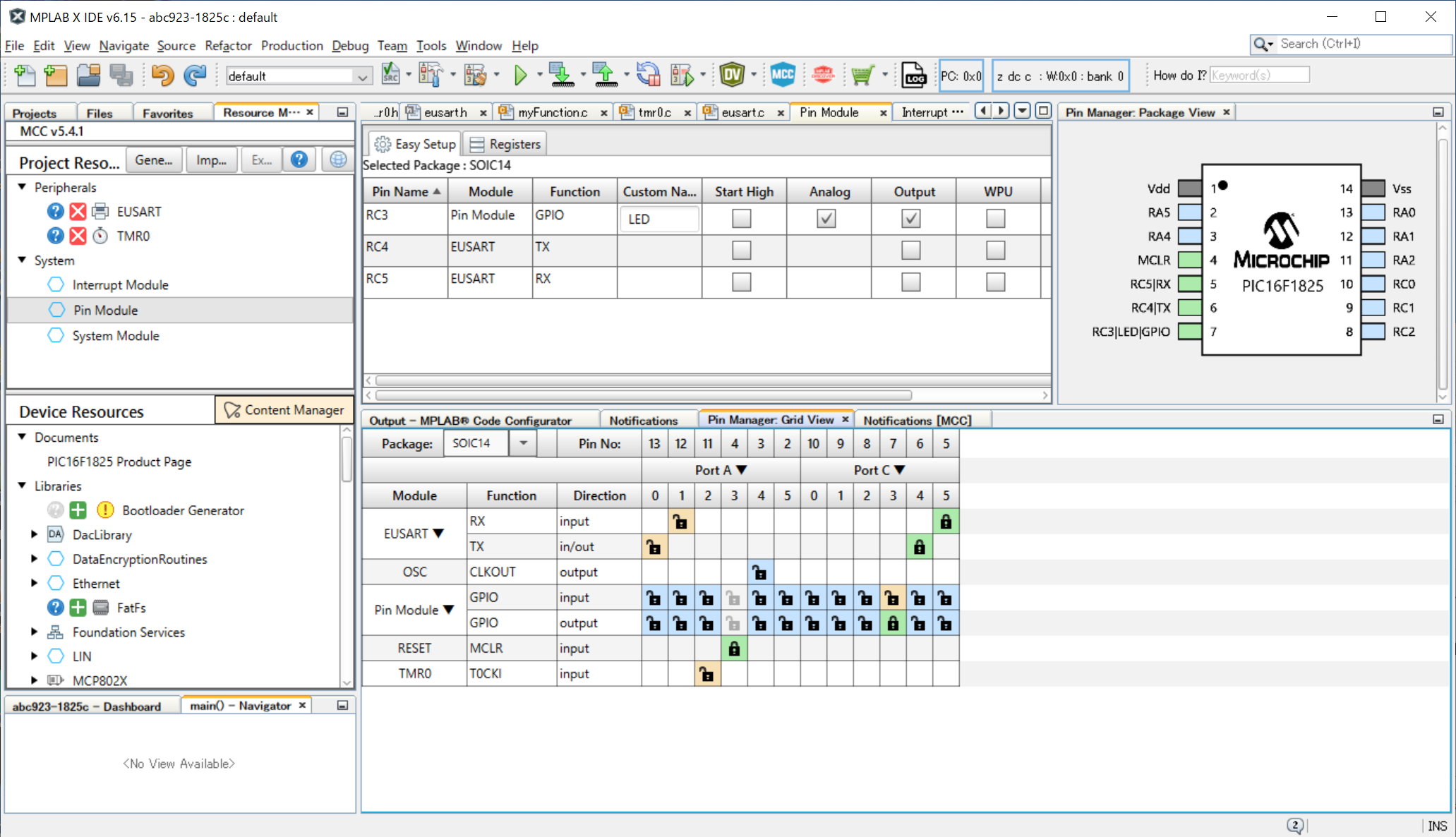 system module (INTOSC偱16MHz) 丂 |
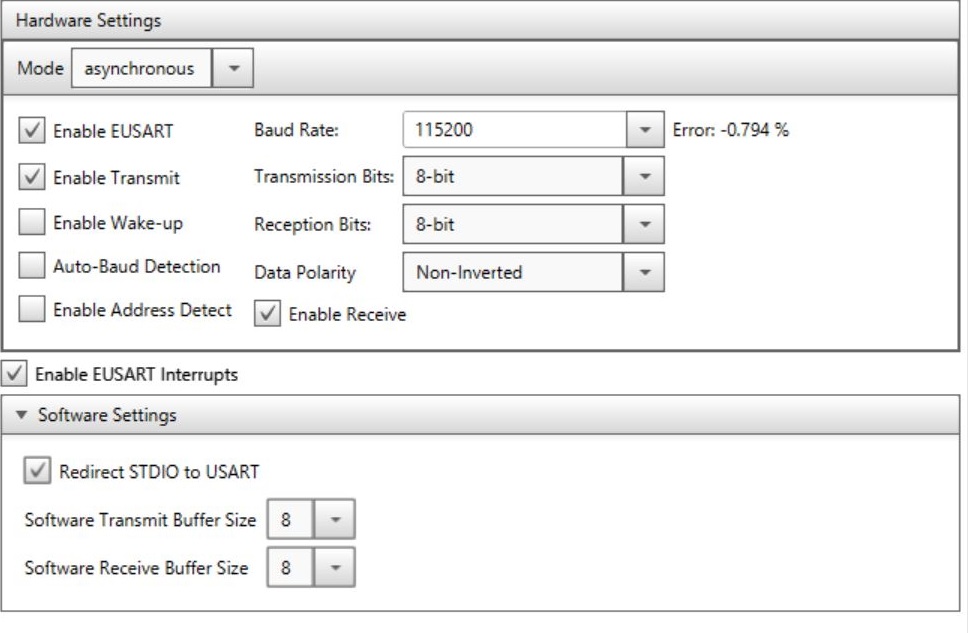 EUSART 乮115200bps) 丂 |
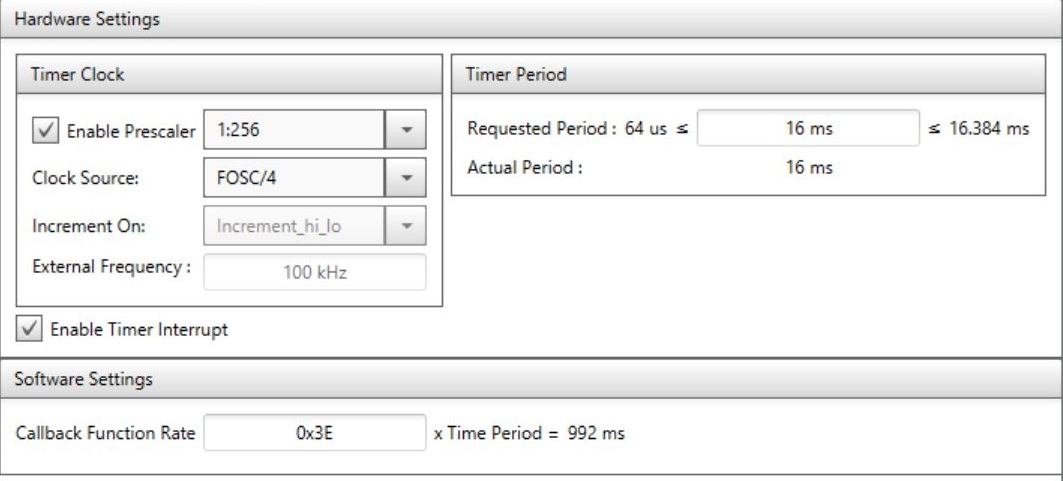 TMR0 (栺侾昩枅偺妱傝崬傒偱LED揰柵乯 丂 |
![]() 亂abc923-1823/25.c亃 abc923-1825.c (zip) 乵1823.c傕摨偠乶
亂abc923-1823/25.c亃 abc923-1825.c (zip) 乵1823.c傕摨偠乶
|
丒僔儕傾儖捠怣梡乮mcc_generated_files/eusart.c偵2峴傪捛壛乯
亂eusart.c亃
|
丒僆儕僕僫儖儔僀僽儔儕乕丂
亂myFunction.c亃 myFunction.c + myProject.h(zip)
|
|
仸僾儘僌儔儉偺儕僗僩傪僴僀儔僀僩柍偟偺僗僞僀儖偱尒傞応崌偼偙偙傪僋儕僢僋
仸 杮儗億乕僩偺嶲峫丒棙梡偼丄偁偔傑偱傕帺屓愑擟偱偍婅偄偟傑偡丅
 |
 |
 |