 丂
丂

 丂
丂
 丂
丂
丂
丂
丂儚乕僪傗堦懢榊偱埲壓偺曽朄偱悢幃傪擖椡偡傞偙偲偑偱偒傑偡丅
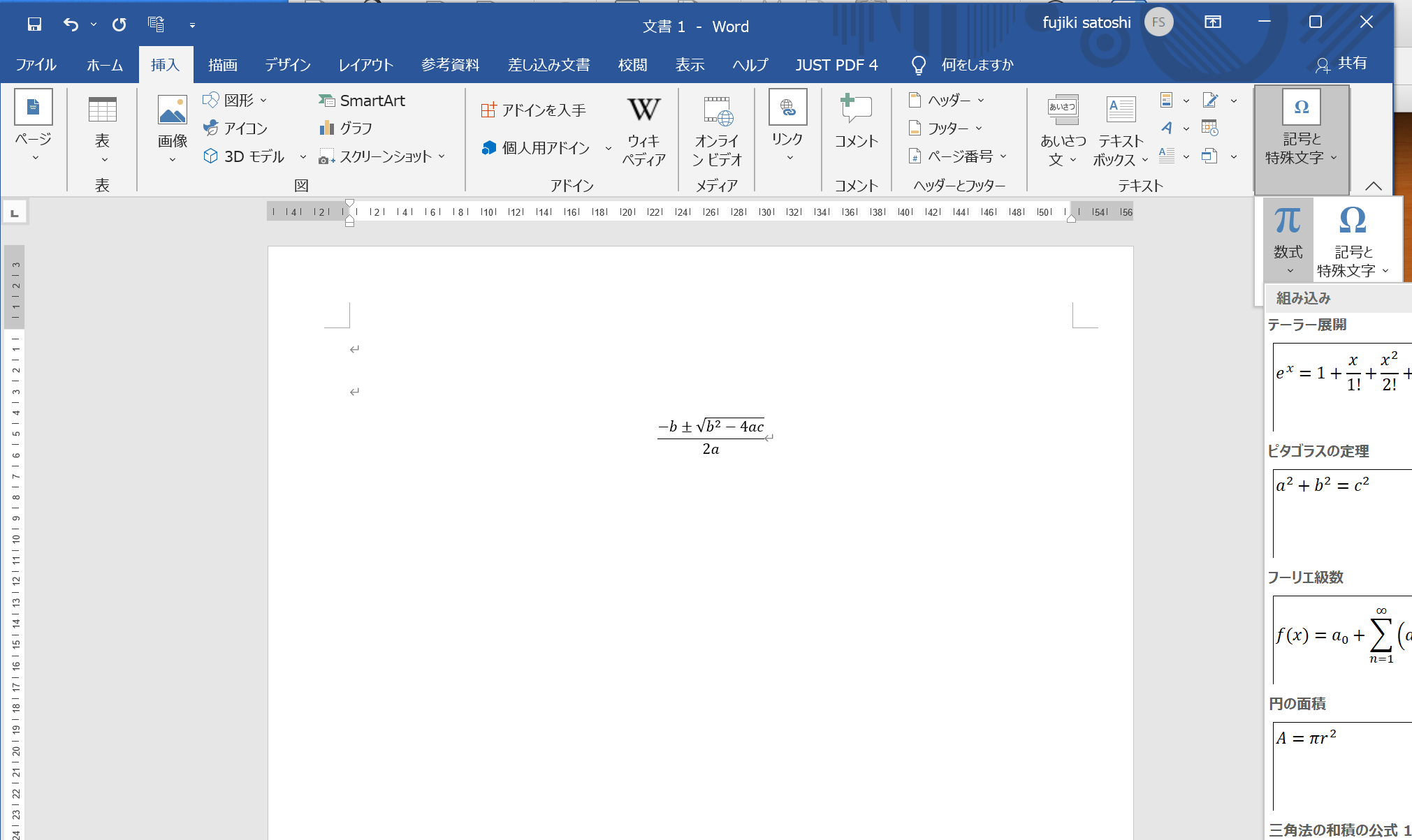
Word偱偺悢幃擖椡椺 |
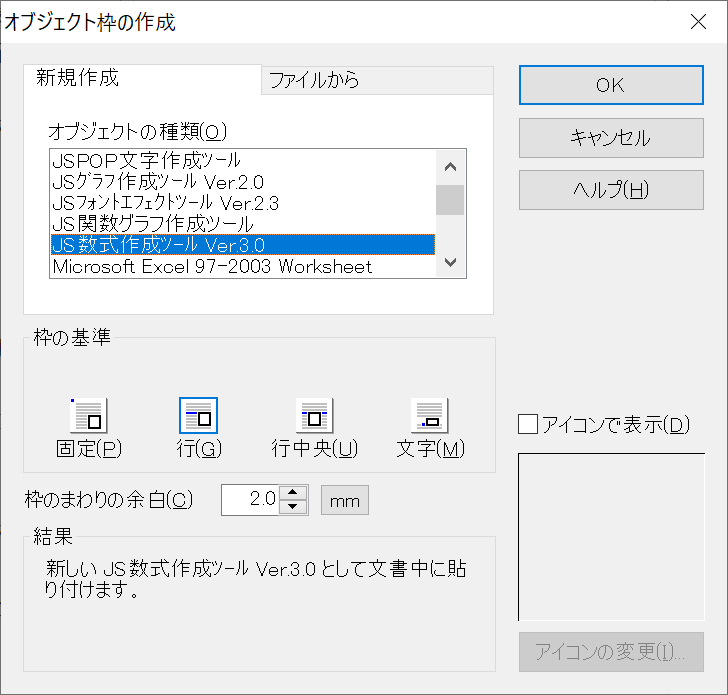
堦懢榊偱悢幃擖椡傪慖傇 |
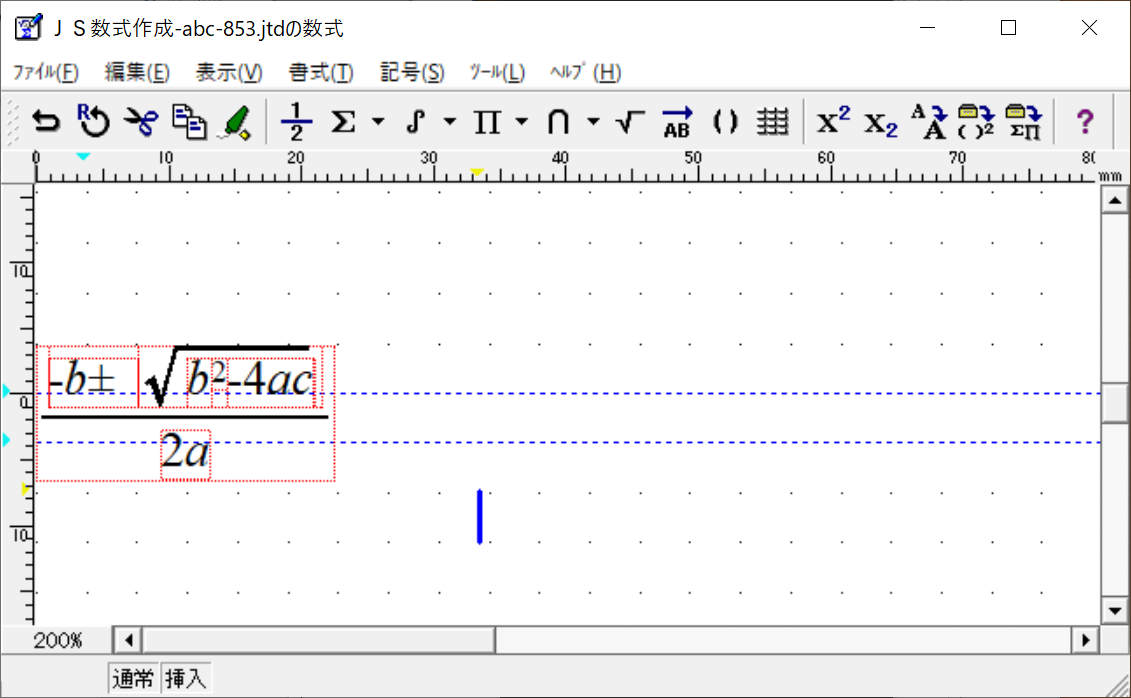
堦懢榊偱偺悢幃擖椡椺 |
丂abc851偱帺摦塣揮傪幚尰偟偨偑丄崱夞捛壛偟偨婡擻偼丄嵟戝26屄偺億僀儞僩乮暘婒婍乯偺愗懼偲丄嵟戝俋曇惉偺憱峴楍幵偺慖戰偱偁傞丅億僀儞僩偺惂屼偼丄drc偵乪A'乣'Z'傑偨偼乪a'乣'z'傪巜掕偟丅戝暥帤/彫暥帤偺堘偄偱暘婒偺曽岦傪巜掕偡傞丅傑偨丄憱峴偝偣傞楍幵偺慖戰偼丄drc偵'侾'乣'俋'傪巜掕偡傞偙偲偱丄嵟戝俋曇惉偺楍幵傪慖戰偱偒傞丅偳偪傜偺愝掕傕楍幵偑掆巭拞偺忬懺偺帪偺傒巜掕偱偒傞丅
丂億僀儞僩愗懼丄塣揮楍幵傪曄峏偡傞応崌丄楍幵偵揹埑偑報壛偝傟側偄傛偆偵丄pwm = 0(忢揰摂傕OFF)偵偟偰偄傞丅傑偨丄曄峏偑埨掕偡傞傑偱偺帪娫偲偟偰丄stm偵偼嵟掅偱傕10(1昩乯埲忋傪愝掕偡傞偙偲丅
丒drc偺曄峏偼楍幵偺掆巭帪偵偺傒峴傢傟丄
丂丂丂drc亖0乮0x00丄掆巭乯丄1(0x01丄慜恑)丄2(0x02丄屻戅乯
丂丂丂drc亖 '1' (0x31)乣'9' (0x39)偺嵟戝9庬椶偺幵椉丅
丂丂丂drc亖 'A' (0x41)乛'a'(0x61)乣'Z'(0x5A)乛'z'(0x7A)偺嵟戝26僇強偺億僀儞僩丅
丂
丂楍幵偺彊峴懍搙偲忢揰摂掆巭懍搙傪掕悢偲偟偰偄偨偑丄暋悢偺楍幵偵懳墳偡傞偨傔丄spd偵2000埲忋傪巜掕偡傞偲丄偦偺帪慖戰偝傟偰偄傞楍幵偺僷儔儊乕僞傪埲壓偺傛偆偵棙梡偡傞偙偲偵偟偨丅
丒spd亞2000偺応崌丄憱峴僷儔儊乕僞偼楍幵僷儔儊乕僞傪棙梡
丂丂丂spd亖2000丂rsL乮忢帪揰摂乯掆幵傪巜掕
丂丂丂spd亖2001丂slw彊峴乵掆巭弨旛乶(憱峴壓尷懍搙乯傪巜掕
丂丂丂spd亖2002丂slw亄(upL亅slw)亊1/4懍搙乮掅懍乯傪巜掕
丂丂丂spd亖2003丂slw亄(upL亅slw)亊1/2懍搙乮拞懍乯傪巜掕
丂丂丂spd亖2004丂slw亄(upL亅slw)亊3/4懍搙乮弨崅懍乯傪巜掕
丂丂丂spd亖2005丂upL崅懍乮憱峴忋尷懍搙乯巜掕
丂
丂崱夞巊梡偟偨PIC偼20僺儞偺PIC16F18346偱丄僙儞僒偲億僀儞僩偺崌寁偱嵟戝11乮PA0/1傕巊梡乯傑偱巊偊傞丅傑偨丄14僺儞偺PIC16F18325/18326傕摨偠僺儞攝抲偱丄崱夞偺椺偱偼RC6-7丄PB4-6偼巊梡偟偰偄側偄偺偱丄偦偺傑傑僜働僢僩偵嵎偟崬傫偱巊梡壜擻偱丄偙偺応崌偼嵟戝5偲側傞丅側偍丄僺儞攝抲偼堎側傞偑28僺儞偺PIC16F18857傪巊偆偲嵟戝18偲側傞丅
丂側偍丄僥僗僩帪丄5V揹尮偼USB嫙媼偲偟偨偺偱丄5V偺3抂巕儗僊儏儗乕僞乕偼奜偟偰偄傞乮12V揹尮抂巕偺偦偽偵憰拝壜乯丅
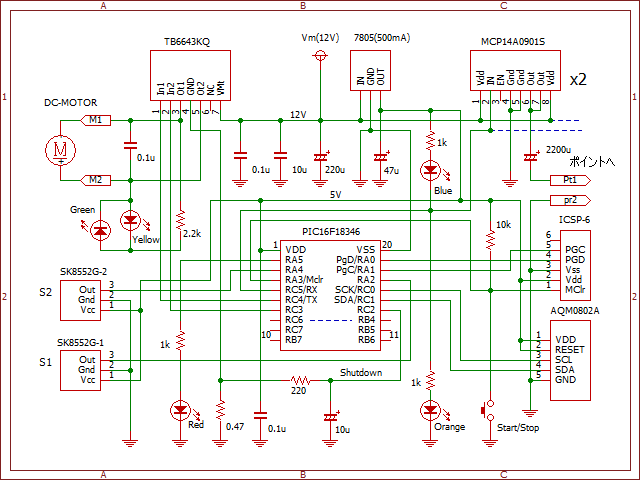
億僀儞僩惂屼晅偒僷儚乕僷僢僋夞楬 |
PIC16F18346傪巊偭偨帋嶌夞楬 乮億僀儞僩惂屼僪儔僀僶乕偼屄乆偵昁梫乯 |
丂亂MCC偺愝掕亃丂MCC偺愝掕偼abc850偲傎傏摨偠(ADC偼巊梡偟側偄乯偱丄嵞宖嵹偡傞偲
亂SyatemModule亃 Oscilater Select = HFINTOSC HF internal Clock = 32_MHz Clock Divider = 1 亂TMR2亃 Check "Enable Timer" 亙Timer Clock亜 Postcaler = 1:1 Prescaler = 1:1 亙Timer Period亜 Timer Period = 32us 亂PWM5亃 Check 乬Enable PWM" Select a Timer = Timer2 亙Duty Cycle亜 Duty Cycle = 0.0% 亙PWM Parameters亜 PWM Polarity = active_hi 亂FVR亃 Check 乬Enable FVR"乭 FVR_buffer1 Gain = off FVR_buffer2 Gain亖1x 亂DAC1亃 Check 乬Enable DAC"乭 Positiv Reference = FVR_buf2 Negativ Reference = VSS 亂CMP1亃 Chek 乬Enable Comparator" Positiv Input 亖DAC Negativ Input 亖CIN2- Output Polarity = not inverted 亂CWG1亃 Check 乬Enable CWG" Input Source = PWM5_OUT Output Mode = Stearing mode Clock Source = FOSC |
丂丂 |
亙Events亜 Rasing Counts = 0 Falling Counts = 0 亙Output Pin Config亜 乮CWGA) Check 乬Enable Stearing" Stearing data = high Polarity = inverted 乮CWGC乯 Check 乬Enable Stearing" Stearing data = high Polarity = inverted 亙AutoShutdown亜 CWGA&CWGC Shutdown State 亖logic1 Check 乬Comparator1 Output乭 亂MSSP亃 Check 乬Interupt Driven" 亙Hardware Setting亜 SerialProtocol = I2C Mode = 乬Master" I2C Clock Frequency = 100000 亙Interupt Setting亜乭 Check "Enable I2C Interrupt" 亂Pin Module亃 Regster/PinModule丗Check "Interrupt Enables乭 RA0(Itr_A0)丗(reserved)丄(ICSP僨乕僞) RA1(Itr_A1)丗(reserved)丄(ICSP僋儘僢僋) RA2(Itr_A2)丗input/degital丄IOC亖positiv RA3(Psw_A3)丗input 丒丒丒僗僀僢僠 RA4(Itr_A4)丗input/degital丄IOC = positive RA5(Led_A5)丗output丂丒丒丒愒LED RC0乮MCL1)丗(I2C僋儘僢僋) RC1乮MDA1)丗(I2C僨乕僞) RC2(CIN2-)丗input乮CWG shutdown擖椡乯 RC3(CWG1C)丗output(PWM弌椡乯丄WUP RC4(CWG1A)丗output(PWM弌椡乯丄WUP RC5(Pt_C5)丗output(億僀儞僩弌椡) |

PinModule愝掕夋柺 |
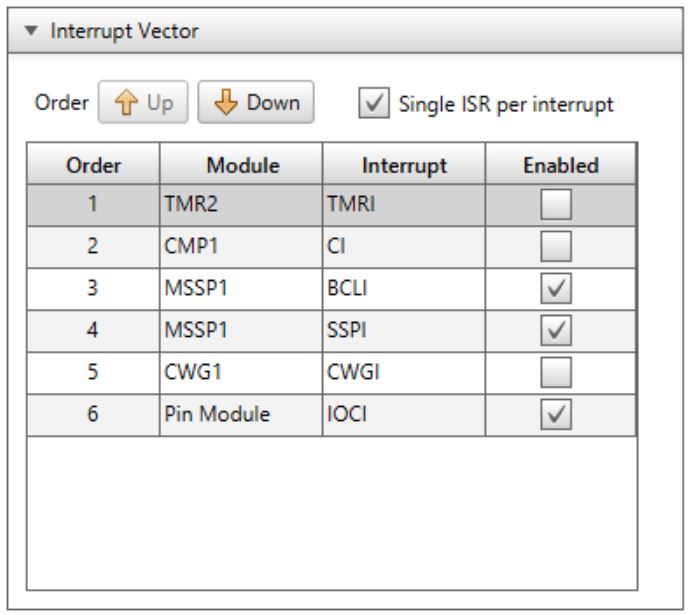
Interrupt Vector 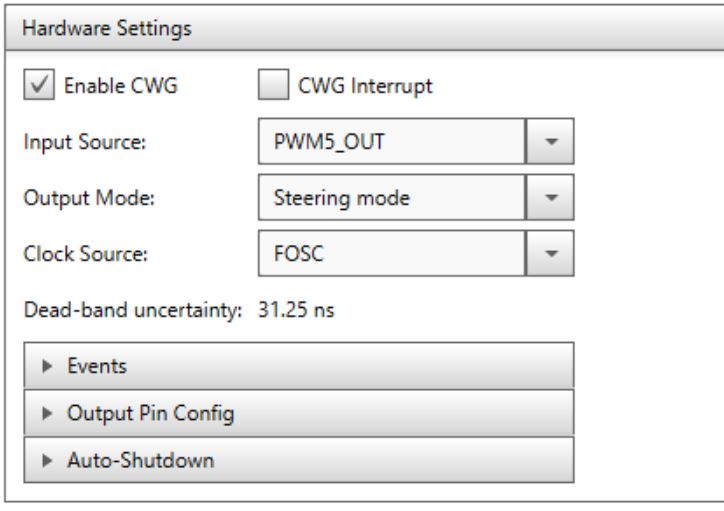
CWG愝掕 |
亂僾儘僌儔儉偺曗懌愢柧亃
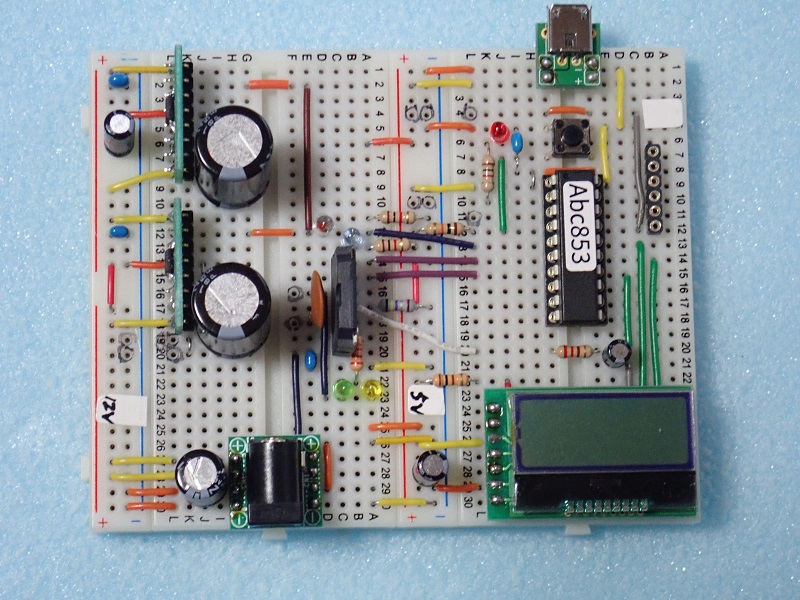
亂楍幵憱峴偺儗僀傾僂僩偲憱峴僥僗僩亃
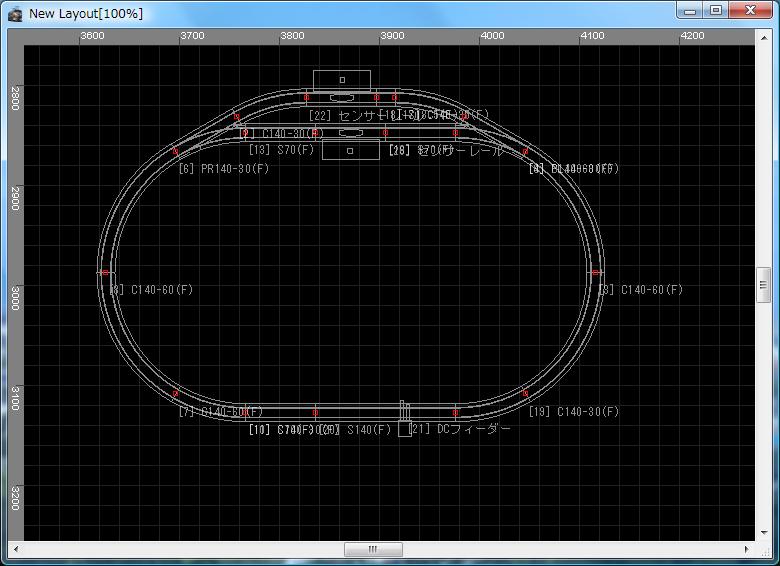
C140偲儈僯億僀儞僩傪巊偭偨儗僀傾僂僩 |
憱峴晽宨(5V偼USB偐傜嫙媼乯 |
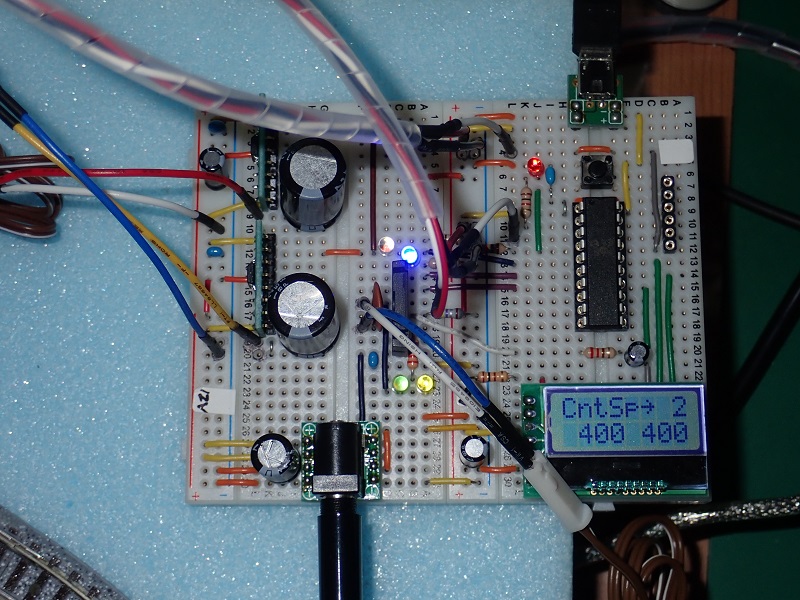
憱峴帪偺僷儚乕僷僢僋昞帵椺 |
|
|
|
仛仛仛丂僩儔僽儖丂仛仛仛 丒丒MCC偺EasySetUp偱嵞愝掕傗曄峏偟偰傕斀塮偝傟側偄偙偲偁傝両両
仸 杮儗億乕僩偺嶲峫丒棙梡偼丄偁偔傑偱傕帺屓愑擟偱偍婅偄偟傑偡丅
 |
 |
 |