


テキスト形式で記録したデータは、以下の手順でエクセルに取り込むことが出来る。なお、テキストファイルの形式は、データが「カンマ」で区切られたCSVファイル、または「空白」で区切られたファイルなどが対象となる。なお、取り込み形式の編集には、Power Queryエディッタを利用する。
これで、エクセルにデータが取り込まれる。テーブルの表示形式は右上の「テーブルスタイル」で変更。
1.「データ」タブで・・ |
2.取り込みファイルを選択 |

3.内容確認後「データ変換」 |
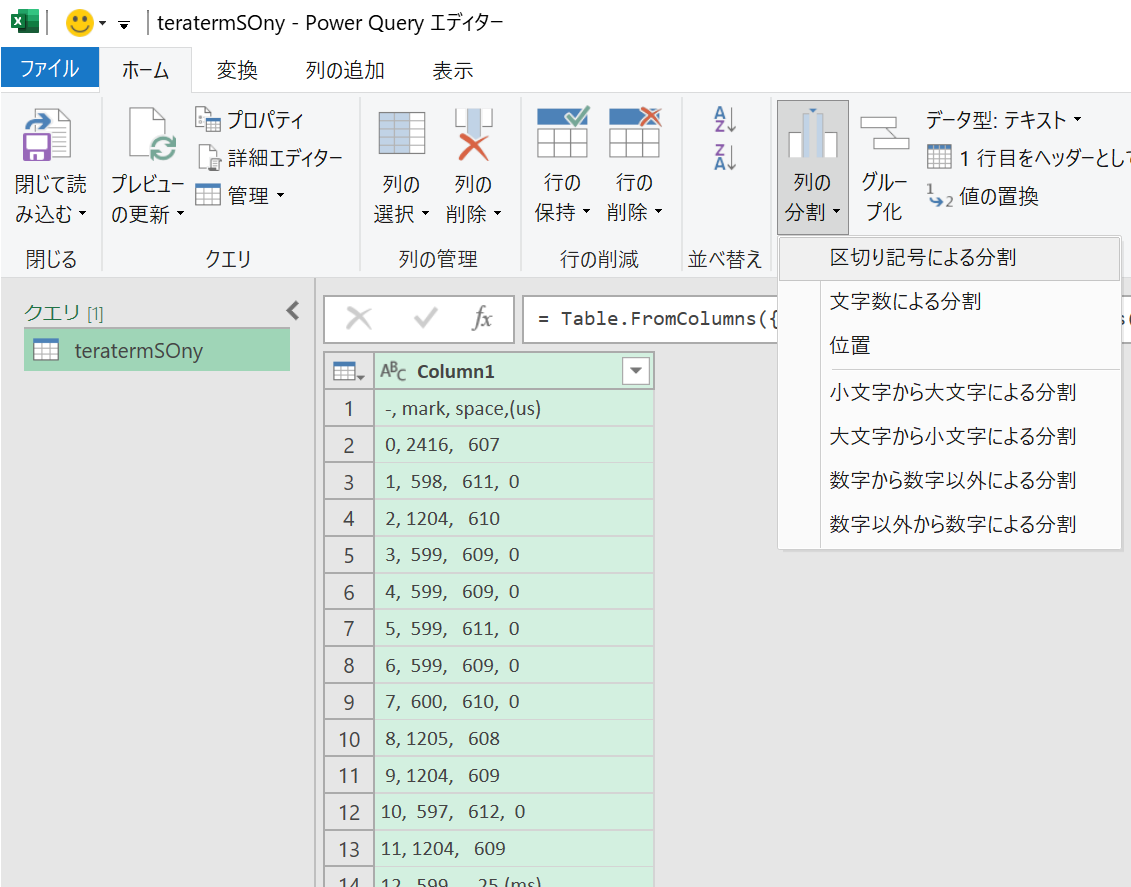
4.PQエディッタで、行分割・・ |
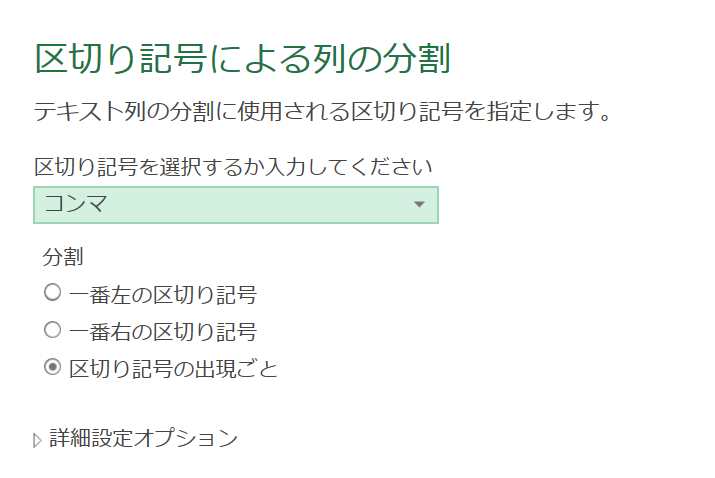
5.区切り記号に「コンマ」 |
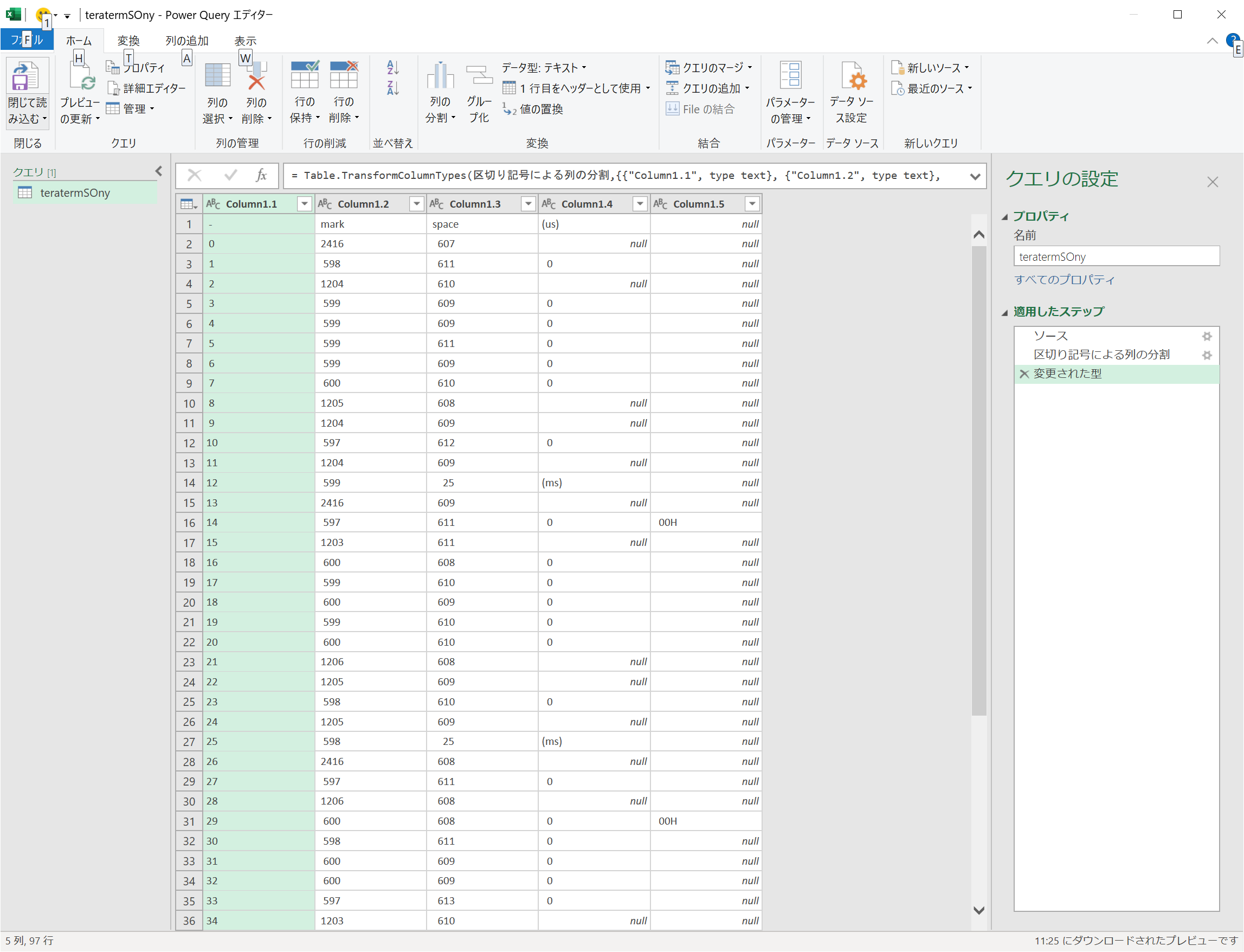
6.確認したらPQエディッタを閉じる |
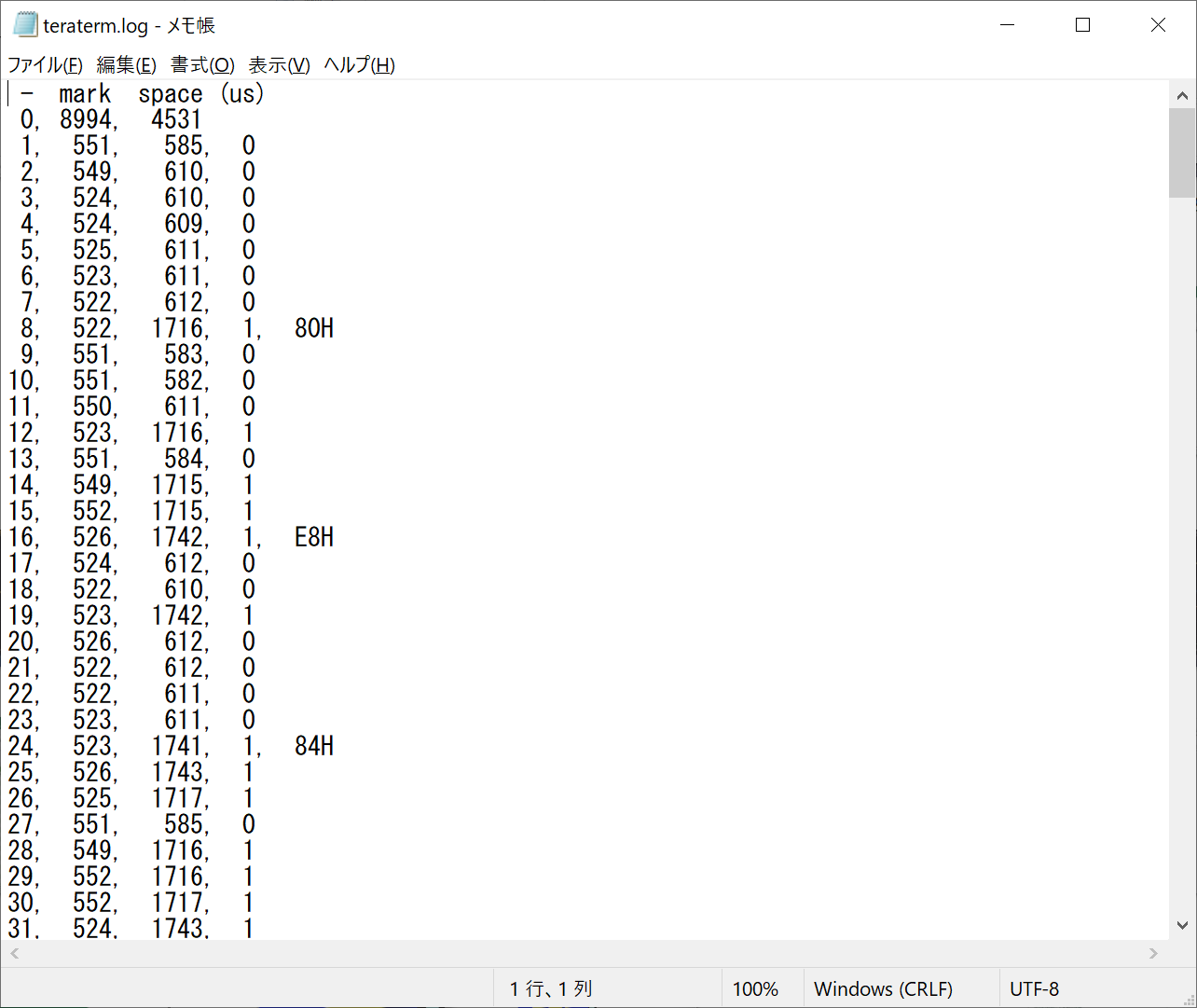
元のテキスト(ログ)ファイル |
テキストファイルを
エクセルに取り込む |

Excelに取り込み終了 |
PICによる赤外線リモコン信号は、①PWMによる38kHz搬送波の作成、②DSMによる搬送波のON/OFFの手順で作成した。
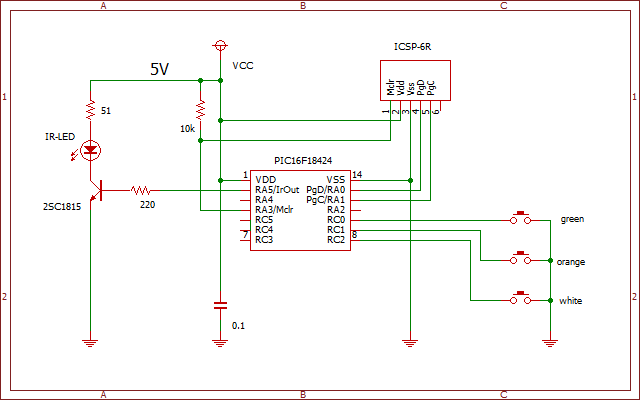
リモコン試作回路図 (irLEDはOSISFU5111C-40) |
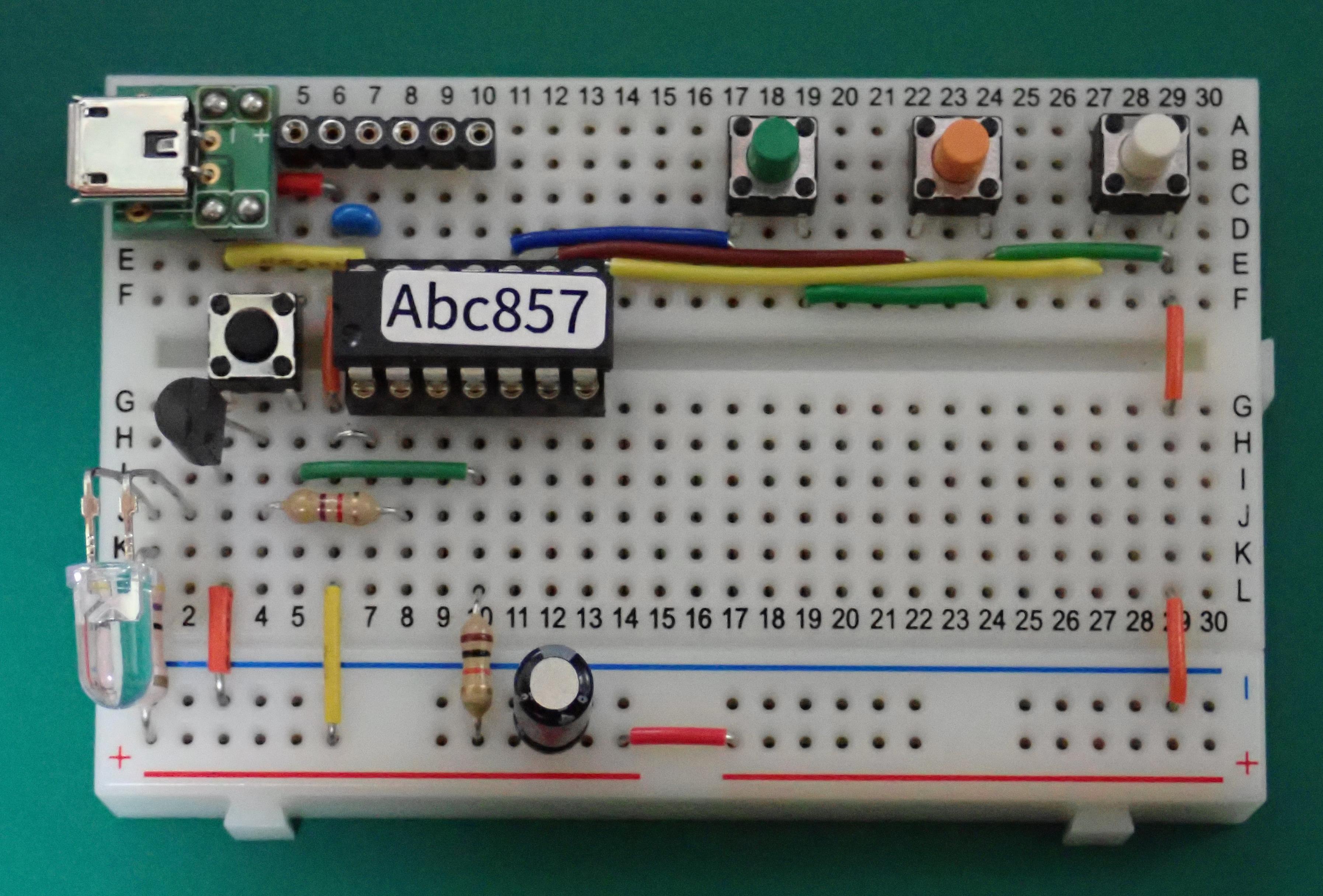
試作リモコン (PIC16F18424使用) |
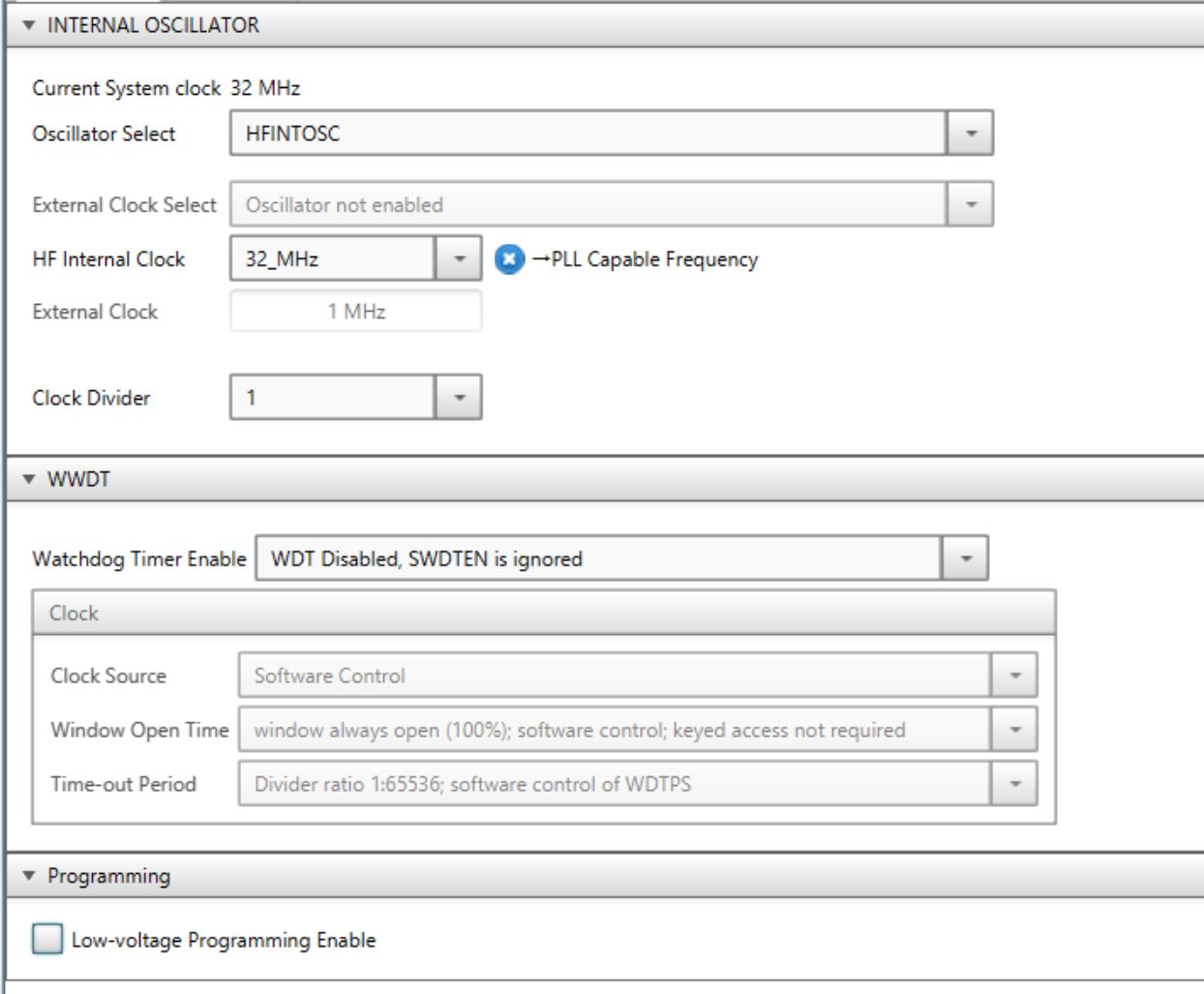
| 【MCC System】 Oscilator: HFINTOSC Clock: 32Mhz Diveder: 1 |
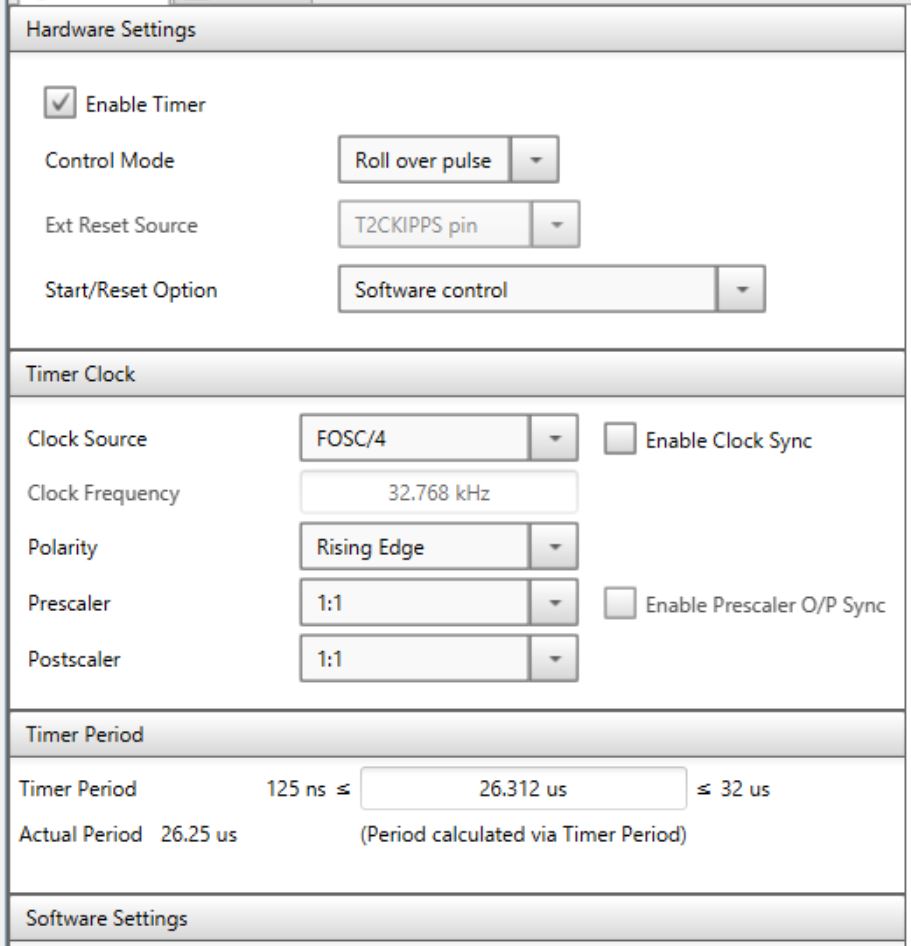
【MCC Timer2】 Enable Timer 'ON' Source: FOSC/4 Period:: 26.312 us |
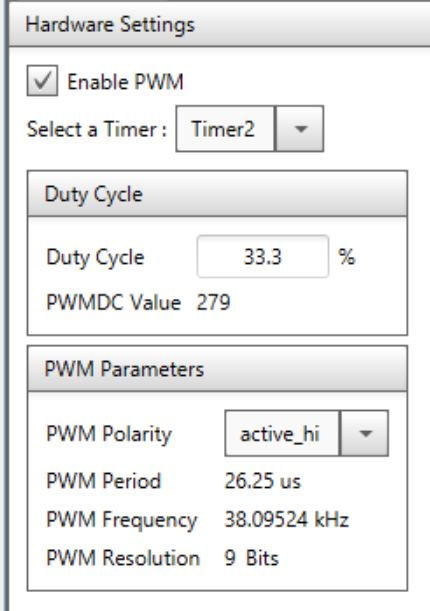
【MCC Pwm6】 Enable PWM ‘ON' Timer: Timer2 Duty: 50 (%) |
|
|
|

搬送波のオシロ波形(dutyは1/2) |
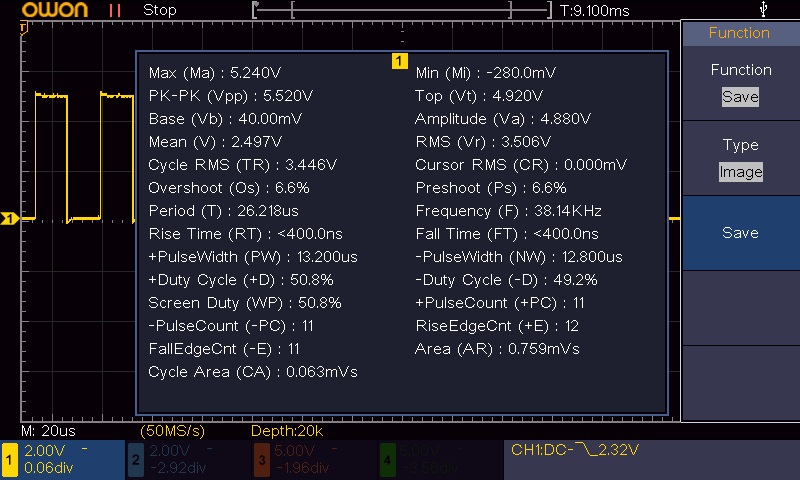
周波数を測定すると38.14kHz、duty:49.2% |
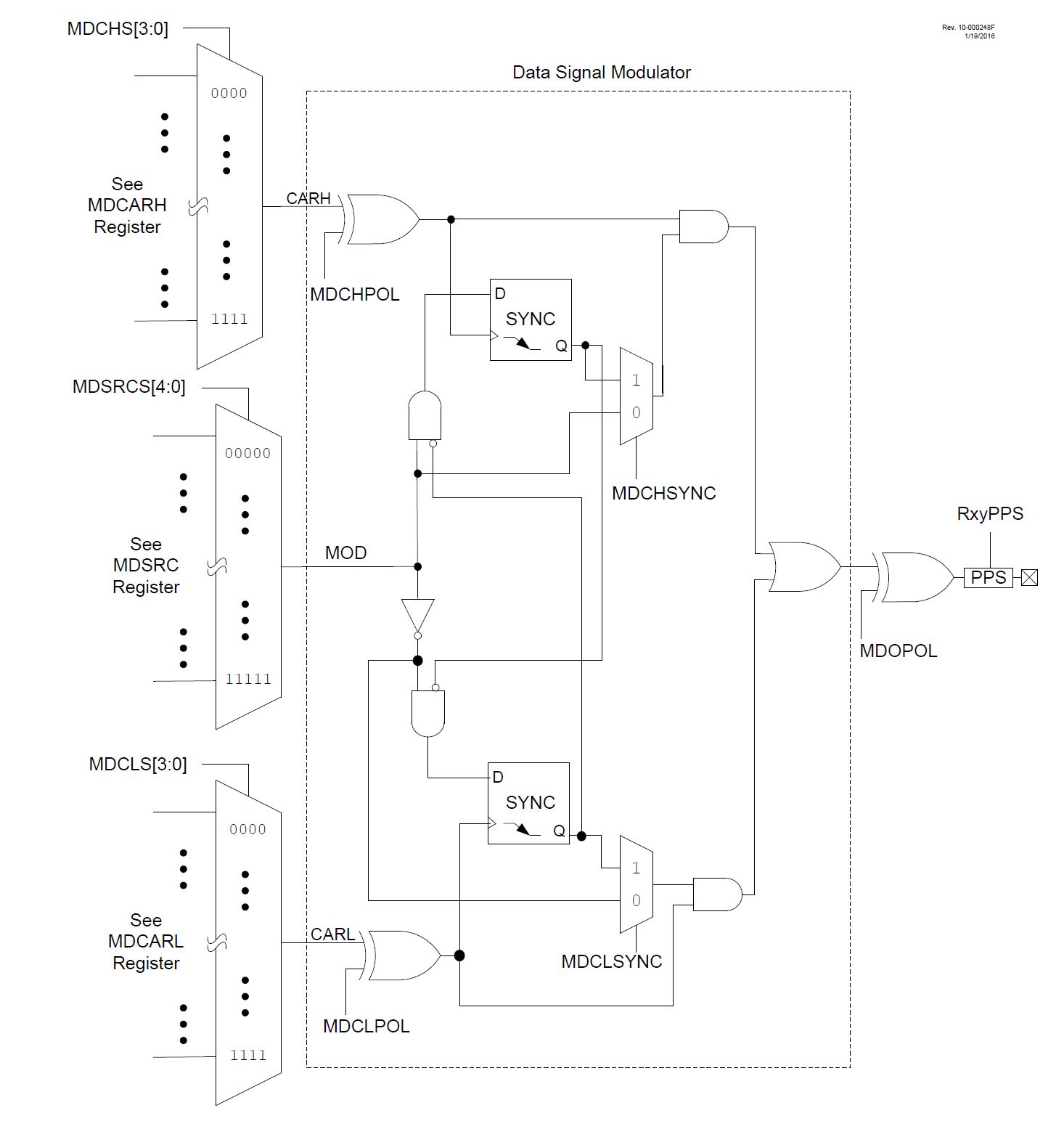
DSMのブロック図 |
【MCC DSM】
Mod.Source = MDBIT High Carrier= PWM6 Low Carrier= LC1_out Synchrorizeにチェック (搬送波と同期) 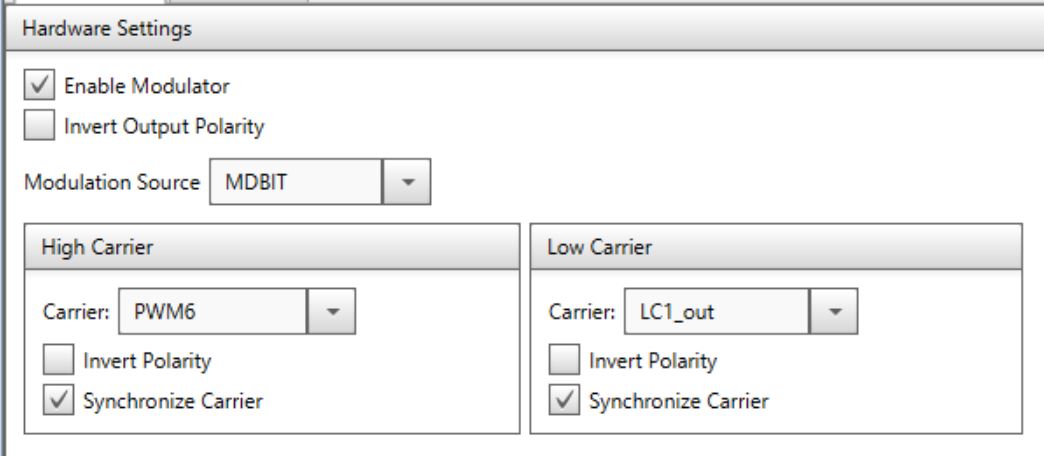
|
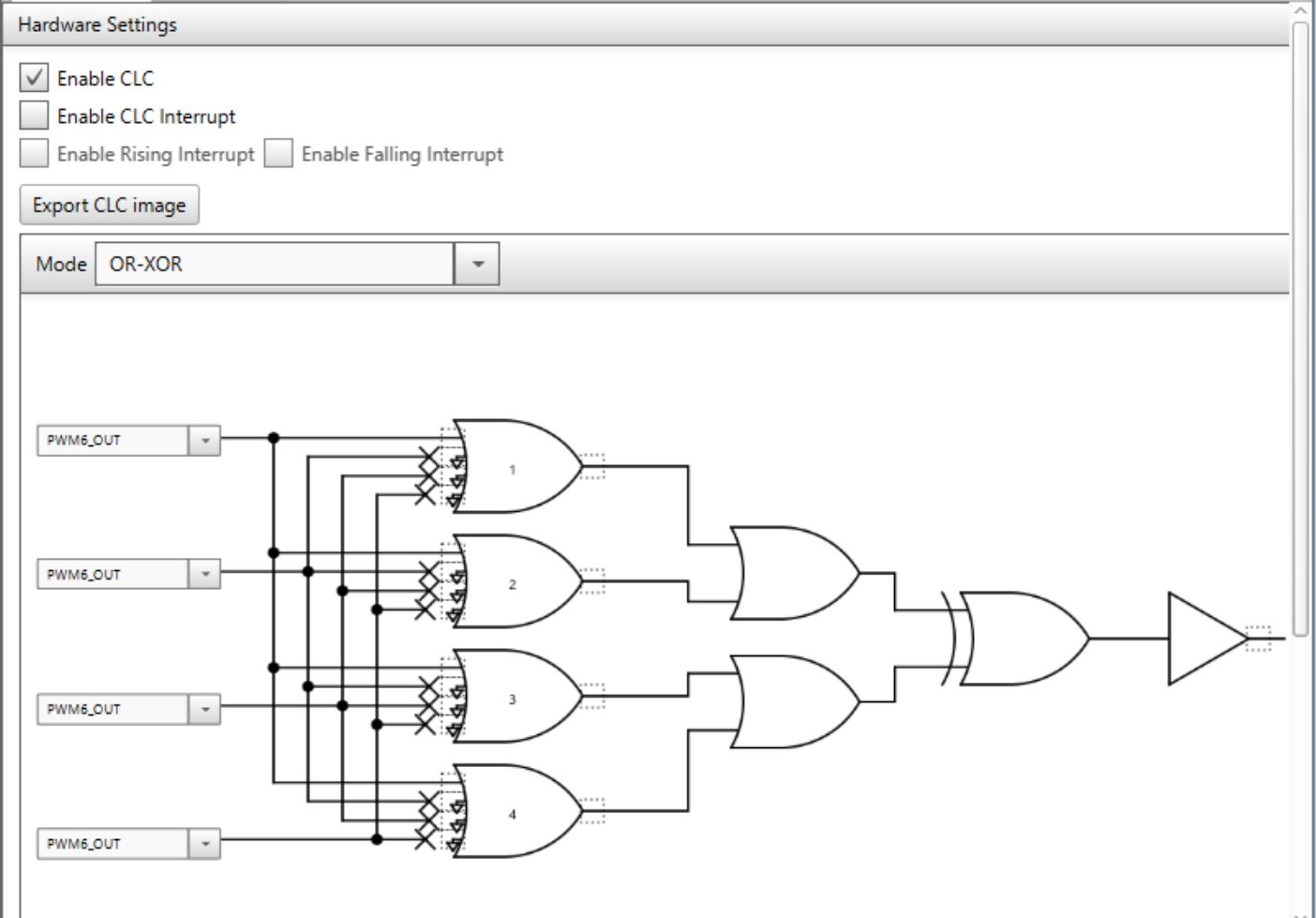
CLCのGUI設定ツールで設定 |
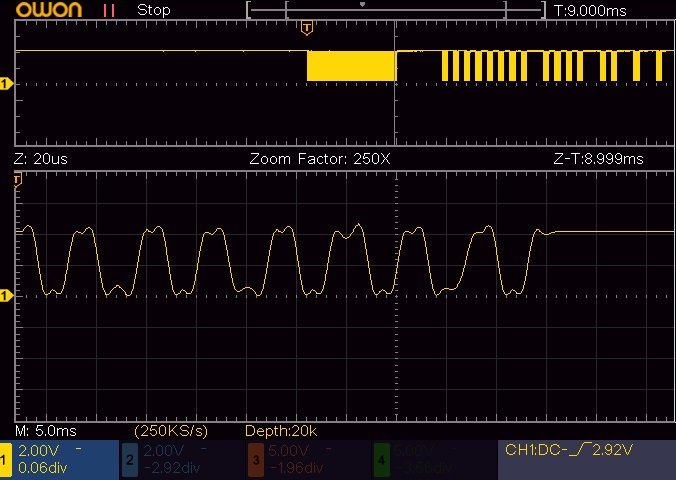
試作品の赤外線Tr出力波形 (下段は拡大波形、搬送波38kHz) 反転波形だが・・チャンと発光 |
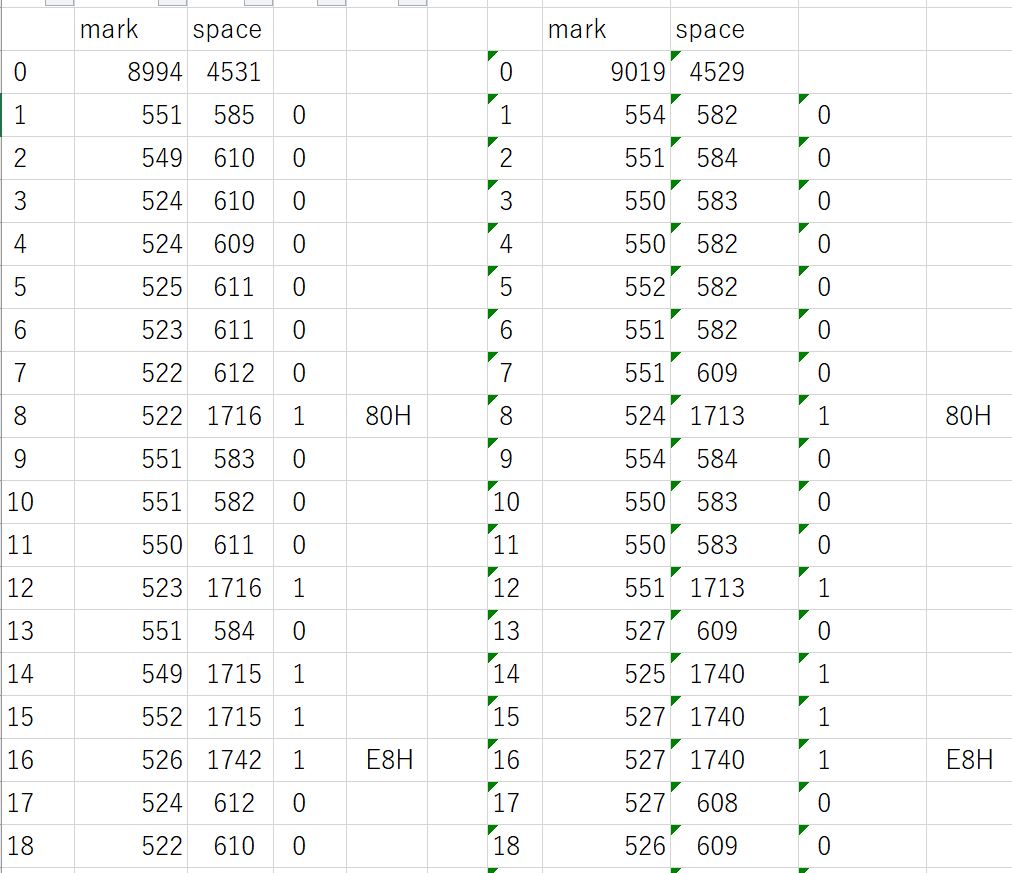
受信データの比較 (左:origal、右:試作品) |

abc856解読器で コードを確認 |
【プログラム】 (abc857-main.zip)
|
※ 本レポートの参考・利用は、あくまでも自己責任でお願いします。
 |
 |
 |