


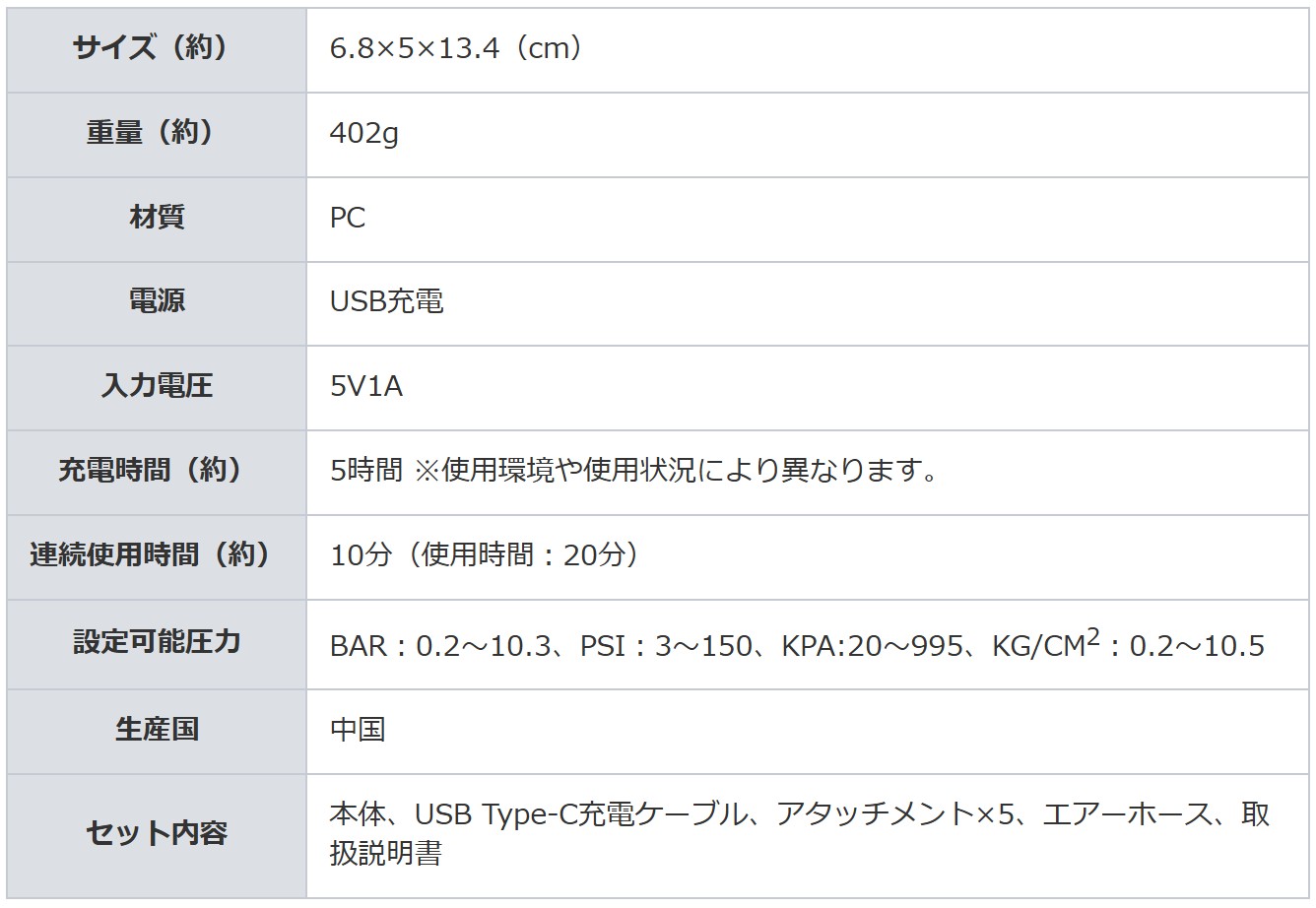
サイクリング中など、電源の無い屋外でタイヤに空気を入れたいことがあります。そこで、デジタルランドの「充電式エアーコンプレッサ」(3,960円)を入手した。
使用時の音は結構大きいが、用途毎にアイコンを選択し、空気圧(最大10.3bar)を設定できるので便利です(前回使用空気圧を記憶させることも可能)。5個の付属アタッチメントは、自転車(米、英、仏)の他、車、バイク、ボール、浮き輪などに利用出来る(連続使用時間は10分が目安)。
また、充電はUSB_type-Cで、LEDライトやモバイルバッテリーとしても使えるので、外出時にはコンパクトなので必携かな。
| |
 エアーコンプレッサの概要 |
 自転車タイヤにエアーを(15秒弱で)充填 |
● Webデータを更新したのに、閲覧履歴のせいで更新データが正しく表示されないことがあります。こんな時は閲覧履歴の削除を実行します。
● 個人のファイル使用情報が見えるので、エクスプローラの履歴の削除は、
スイッチサイエンスで、MCP25625を使ったCAN_BUS通信に必要最低限である11ピンSIPのbreakout基板(@1,800)を入手した。
ミニブレッドボードに、8ピンのPIC12F1840とMCP25625-breakoutを合わせた回路(ノード7)を作成し、以下の仕様で、CAN通信のテストを行った。
【ハード】
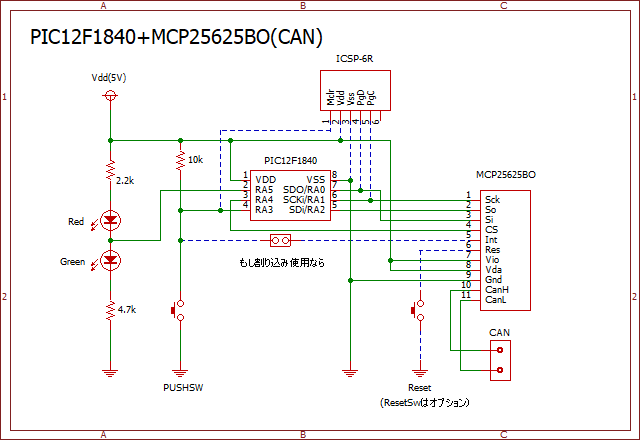 ノード7(PIC12F1840+MCP15625BO)回路図 |
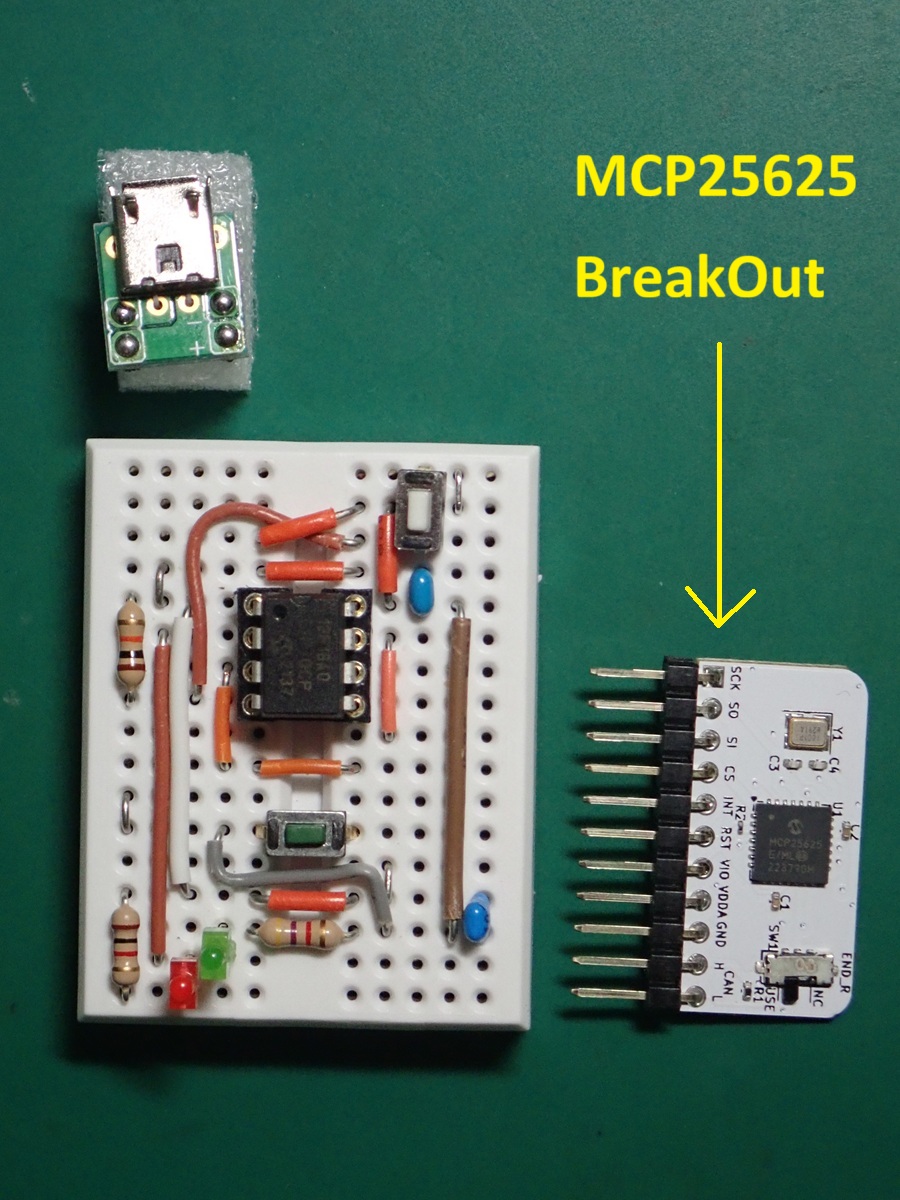 BB(ブレッドボード)配線例 |
【ソフト】
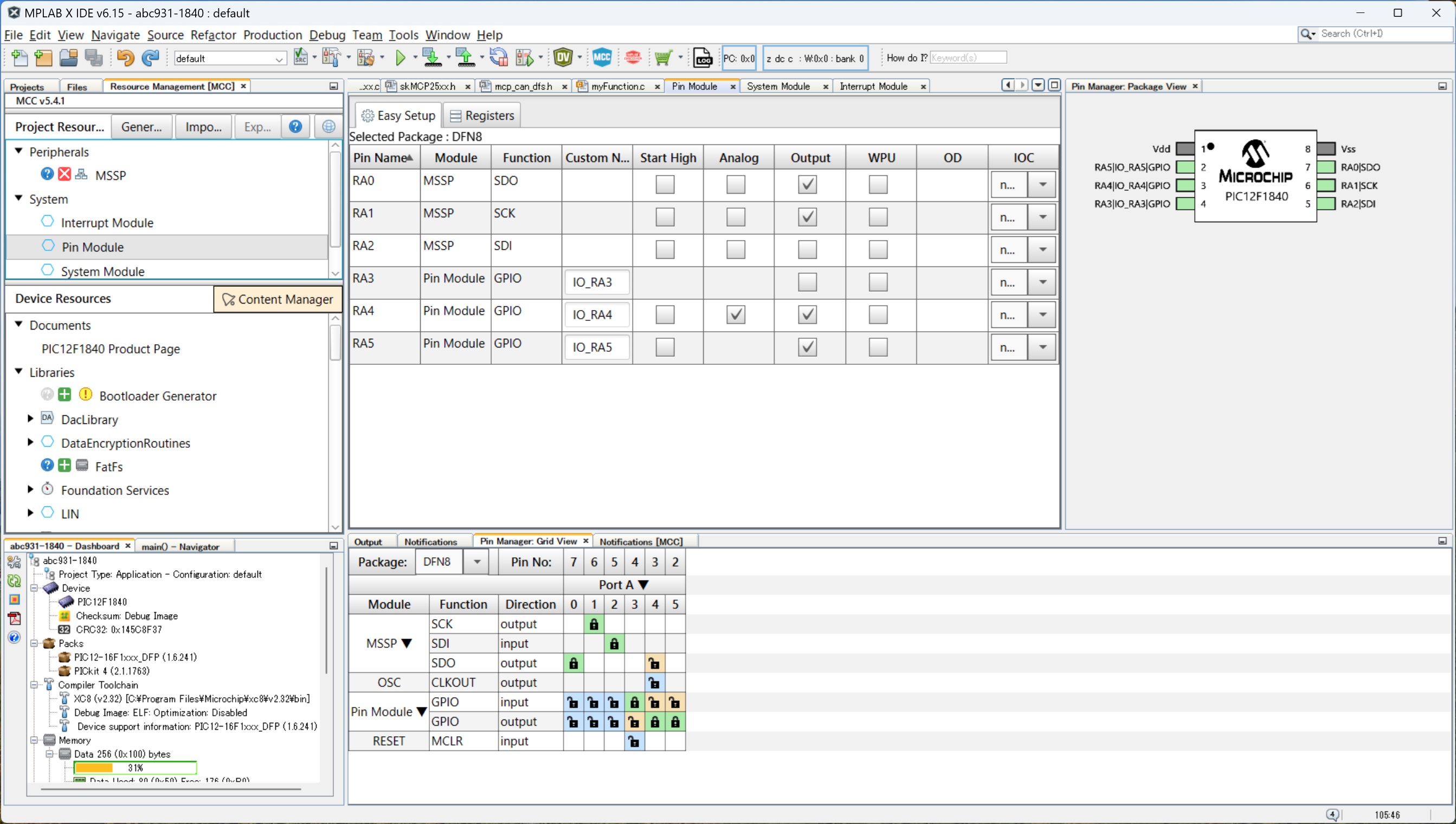 PIN Module (RA3は汎用入力に、割込は使用しない) |
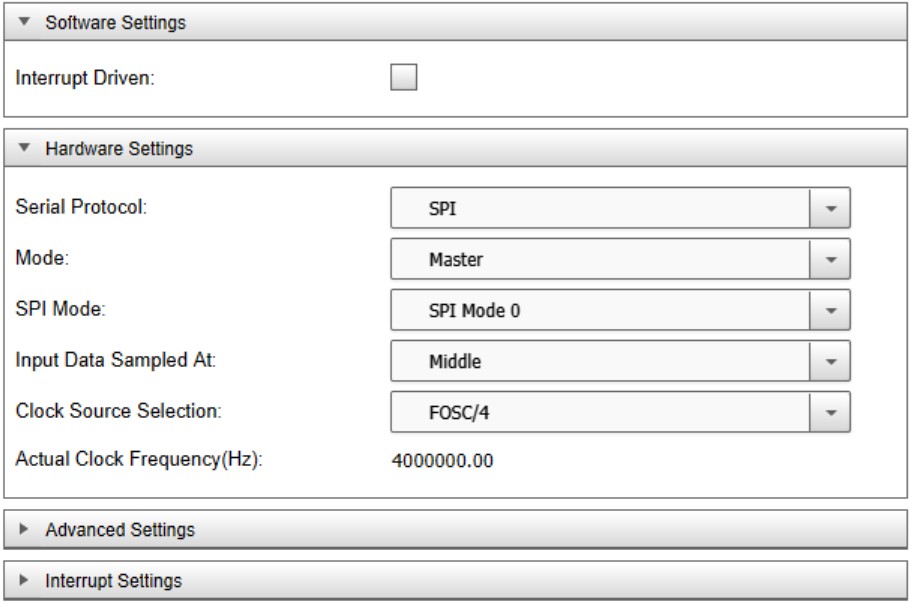 SYSTEM Module(16MHz) 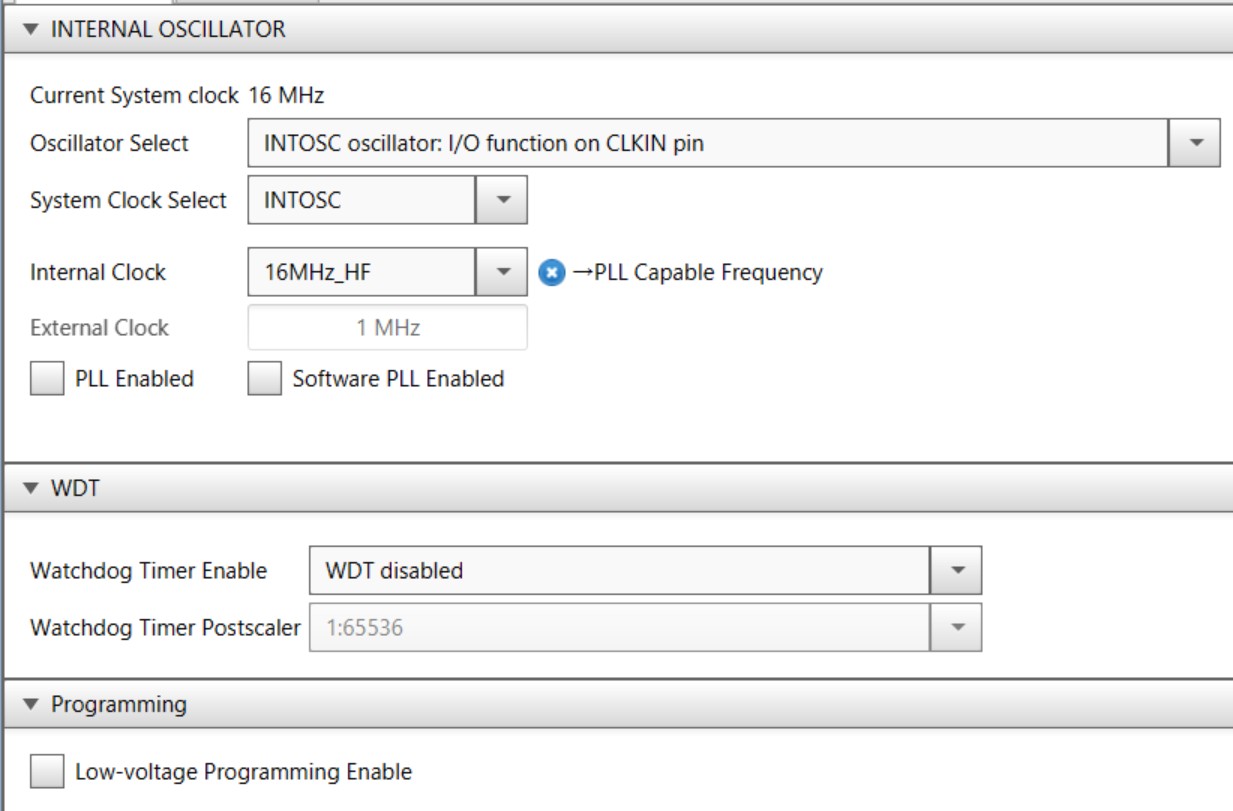 MSSP Module |
【テスト】 ノード5*、ノード6、ノード7*[*は120Ω終端抵抗付き]
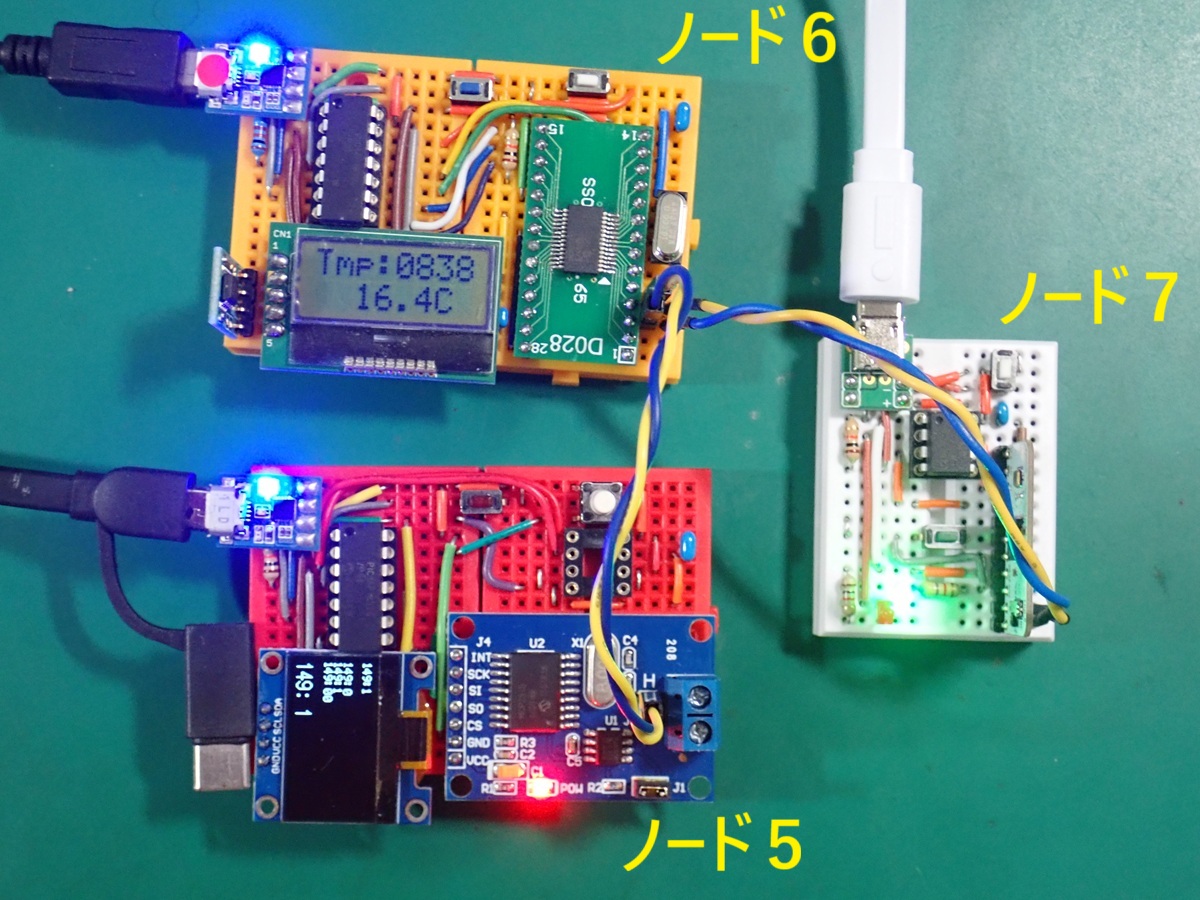 CANテスト風景全体(緑LED点灯[S1受信時]) |
|
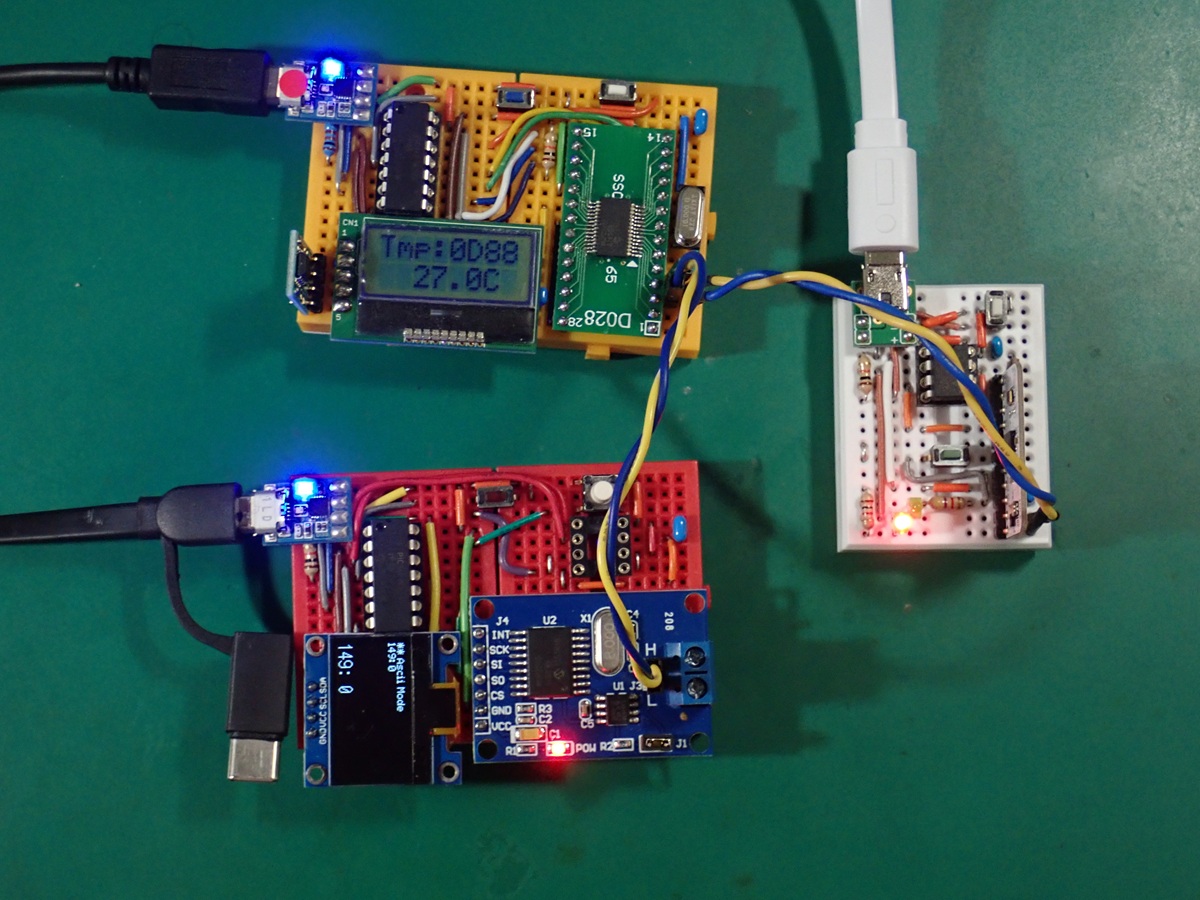 赤LED点灯[S0受信時] |
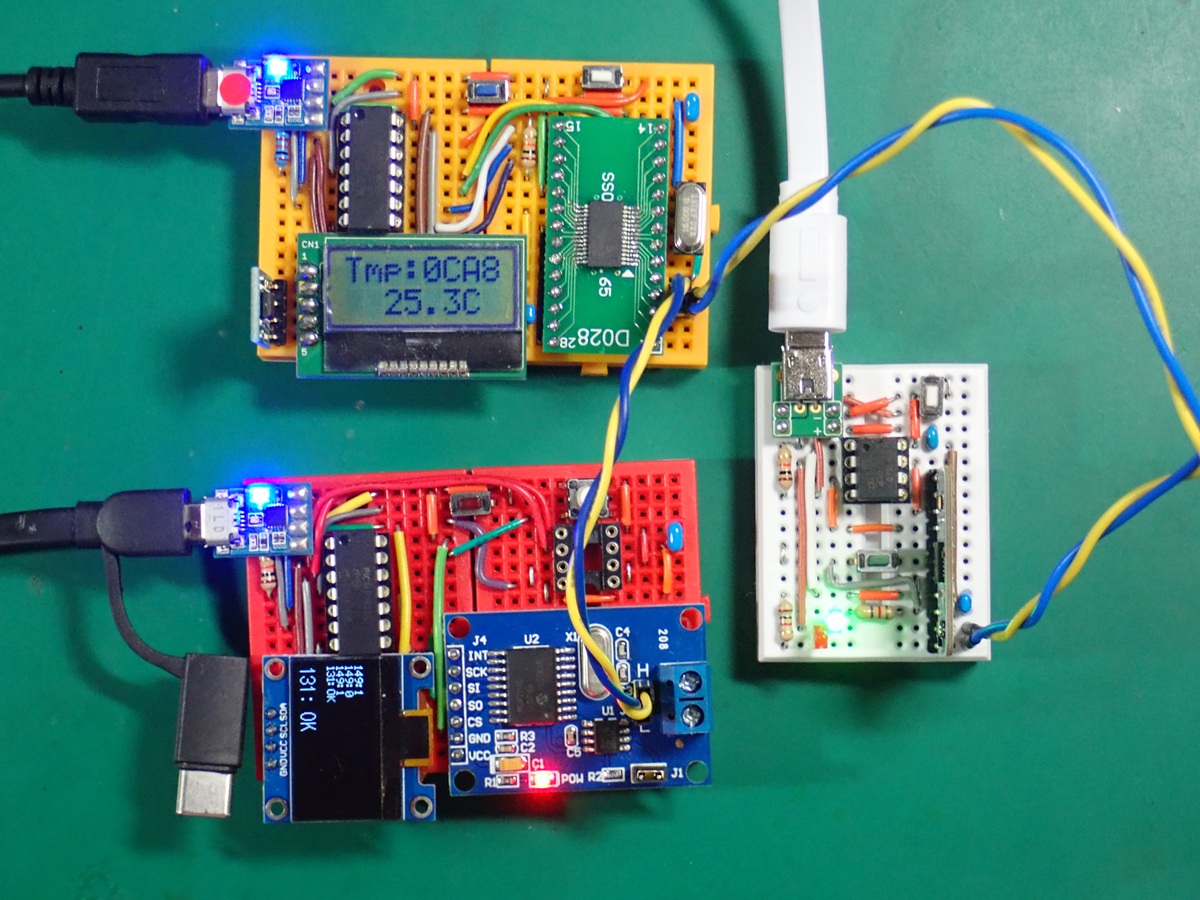 ID=0x131受信例("OK"受信) |
![]()
| ≪≪ ノード7 ≫≫ ▼abc931-1240.c(zip) |
|---|
|
【その他のプログラム】
※プログラムのリストをハイライト無しのスタイルで見る場合はここをクリック
※ 本レポートの参考・利用は、あくまでも自己責任でお願いします。
 |
 |
 |