 �@
�@
 �@
�@
 �@
�@
 �@
�@
�@
�@
�@
�@
�@�g�уe���r�E���W�I�ɒP4�j�b�P�����f�d�r���g���Ă��邪�A�d����1.2V�Ŏg�p���Ԃ��Z�������B�ŋ߁A�P4�i���͒P3�j�T�C�Y�ŏ[�d���̃��`�E���d�r����������Ă���A�d����1.5V�Œ������������Ȃ̂ŁAAmazon�ŁuSANPIMA�P4���`�E���[�d�d�r 1.5V 1300mWh�~8�Z�b�g�v(2,790�~)���|�`��B
�@�����[�d���Ă݂�ƁA8�̓�1��1.3V�܂ł����[�d�ł��Ȃ��������A����7��1.5V�܂ŏ[�d�ł����B�d�r8�ƃP�[�X���p�[�d��ł��̉��i�A���Օi�Ȃ̂�1/8�̏����s�Ǖi�́i��d���ł��g�������Ȃ̂Łj�d���Ȃ��̂��ȁE�E�B
�@����ɁA�}�E�X�p�ɒP3���`�E���[�d�d�r�i�����i�A8���s�Ǖi�����j���N�[�|���L��Ŕ�����������B
 �[�d�����`�E���d�r��USB-C(�v2A)�[�d�� |
�@ |
 �@ �@
 �i���`�E���d�r�j�@�@�@�@�i�j�b�P�����f�d�r�j ���[�d�d�r�̃��x�����[�^�[�\�����قȂ� |
�@Windows �R���s���[�^�[�� �AUSB ����������K�Ɏ��O���Ȃ��ƁA�f�[�^��������\��������܂��B����Ȏ��ɂ́A�u�n�[�h�E�F�A�����S�Ɏ��O���v�A�C�R���ŁA�u���O���v��I�ԂƁA���o�����\��(windows10�ł�)���b�Z�[�W�ŋ����Ă���܂����B
�@�������AWindows 11�̏����ݒ�ł́A���̃A�C�R���͒ʒm�̈�ɕ\������Ă��Ȃ����߁A�ڑ��������Ӌ@����m�F���Ď��O���ꍇ�ɂ́A�B��Ă���A�C�R����\��������K�v������܂��B
|
|
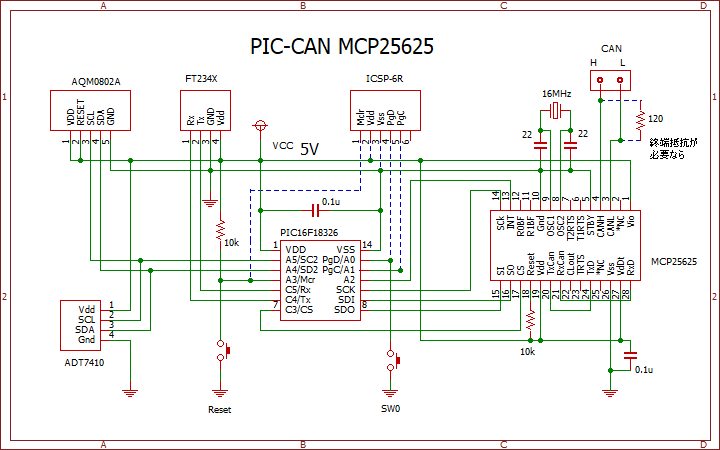
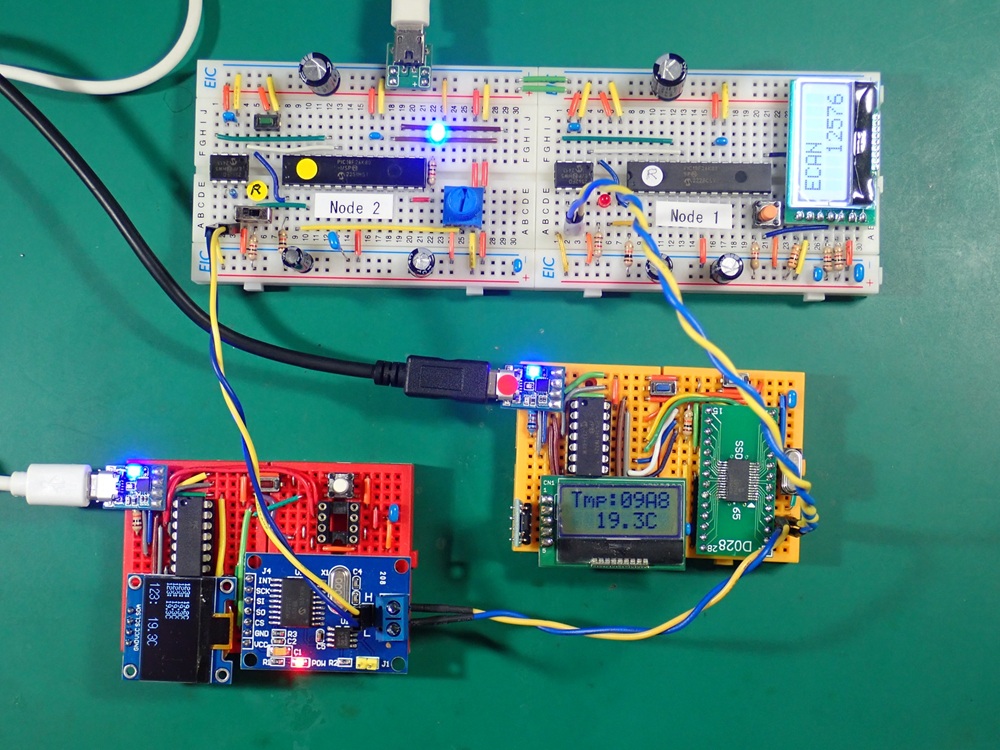
�@�O��iabc929�j�܂ŗ��p����CAN���W���[����MCP2515+TJA1441AT���g�p���Ă��邪�A���[�J�[�ł�MCP2515�̎g�p���A���݂͐������Ă��Ȃ��B�����ŁACAN�R���g���[���[�ƃh���C�o�[���P�`�b�v�Ɏ��[����CAN�g�����V�[�o�[MCP25625�i�H��#112663�A��400�j���g���Ă݂��y�m�[�h6�z�B�Ȃ��AMCP25625��SSOP28�p�b�P�[�W�Ȃ̂ŁADIP�ϊ�����p�����i�莝���̃_�C�Z���d�q���𗘗p�������A�H��#110438�A@50�����p�j�B�����ł�PIC16F18326���g�p�������APIC16F18325�ł�OK�iprintf���g��Ȃ�������Ɨ]�T�j�B
�@MCP25625�̃R���g�[���@�\��MCP2515�Ɠ����Ȃ̂ŁAabc929�Ŏg�p�������C�u�����[�����̂܂g�p���邱�Ƃ��ł���B
�@�܂��ACAN�����łȂ��AI2C���g����ADT7410M�ɂ�鉷�x�f�[�^�̎擾�ƁAAQM0802A�ɂ��LCD�\�����s�����iADT7410�̎g������abc897�Ȃǂ��Q�Ɓj�B���x�f�[�^��1�b���Ƃɑ��肵�ACAN�o�X�ɂ��̃f�[�^���A�X�L�[������ő��M���Ă���B
�@CAN�o�X�ɂ́A�m�[�h6�̑��ɁA�m�[�h1*�A�m�[�h2*�A�m�[�h5�iCAN�o�X���j�^�[�j��ڑ��i*�͏I�[��R120���t���j�B
�y�n�[�h�z
 �m�[�h�U��H�}�iPIC16F18326�AMCP25625�AADT7410�AAQM0802A) |
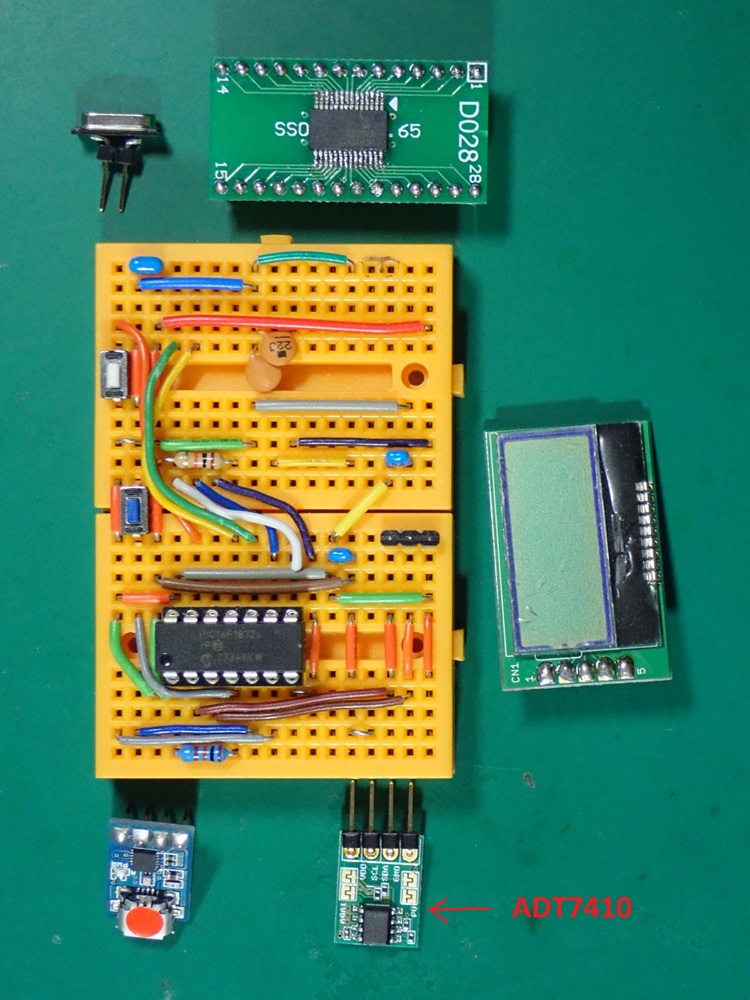 �u���b�h�{�[�h(BB)�z���� |
|
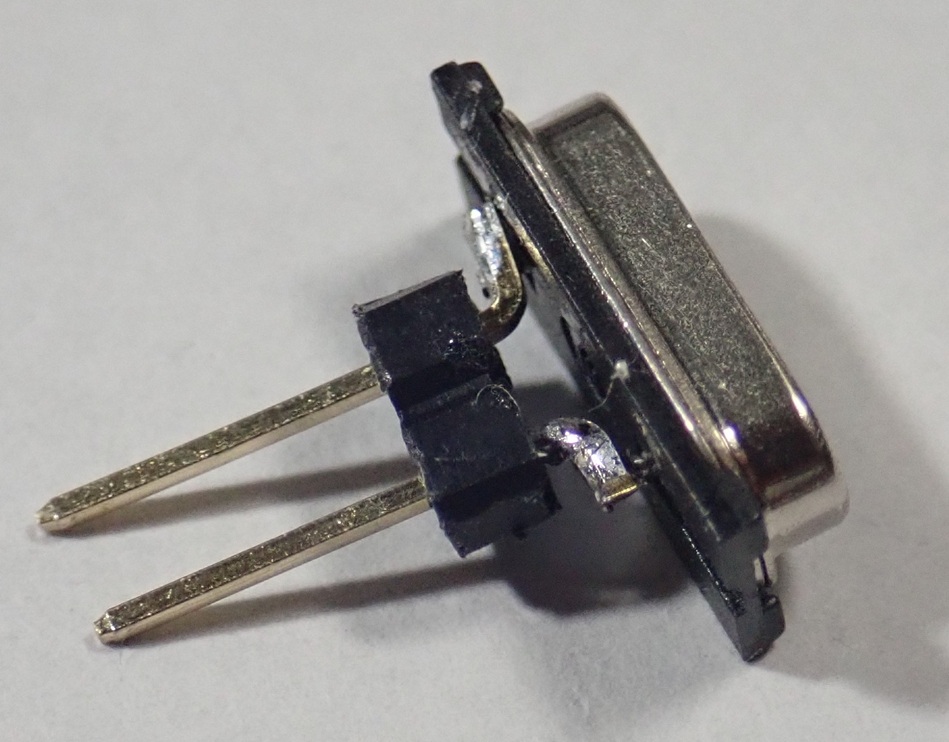
��Xtal�̃��[�h���ׂ͍��A���̂܂�BB�Ɏh���� �@�ɂ��̂ŁAL�^�s���w�b�_�[�Ƀn���_�t������ �@2.54mm�s�b�`�̃s���ɂ����B �@�mXtal���H��#117135�i��150�^5�j�g�p�n |
|
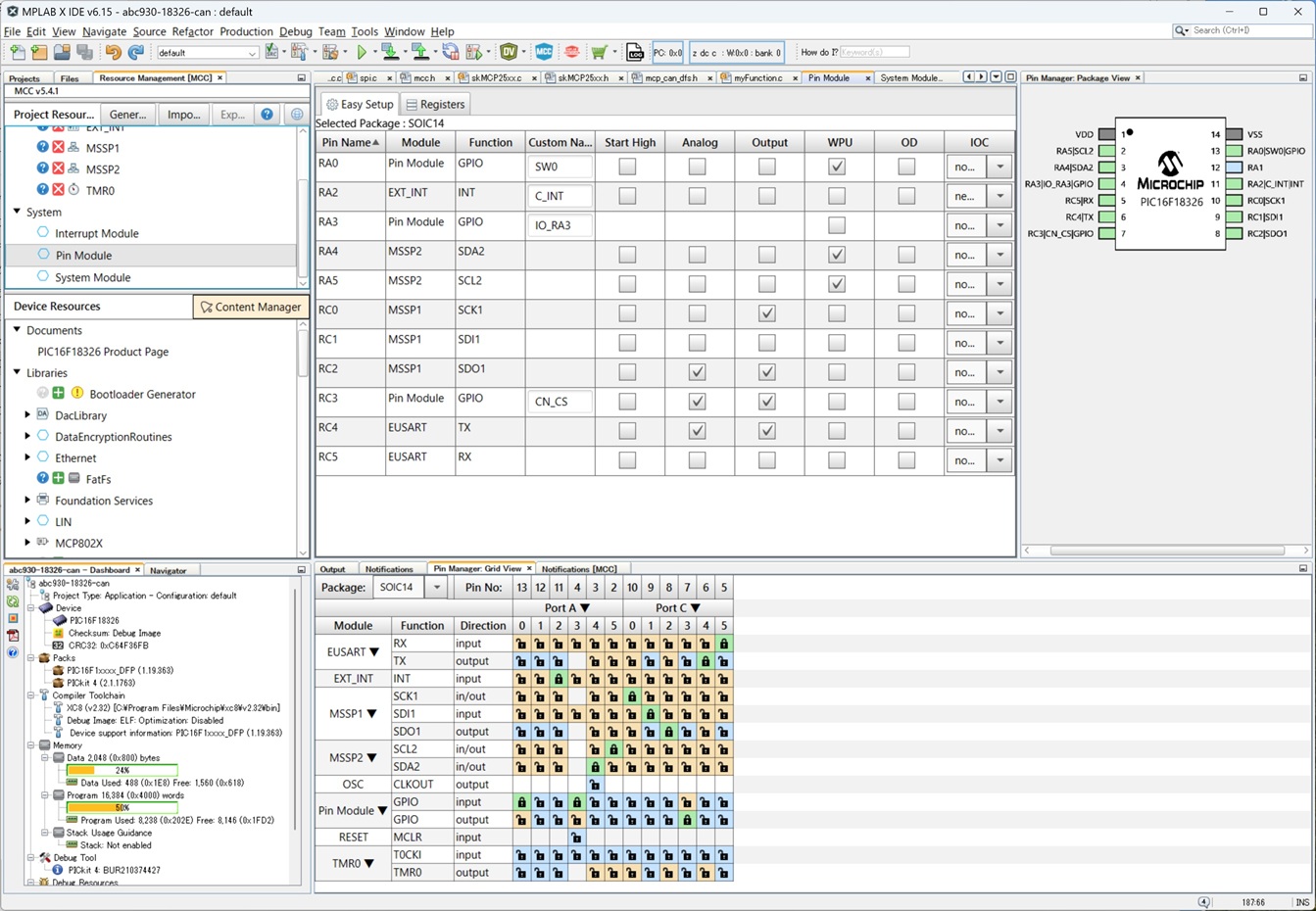
�y�\�t�g�z�@�@MCC�ݒ�
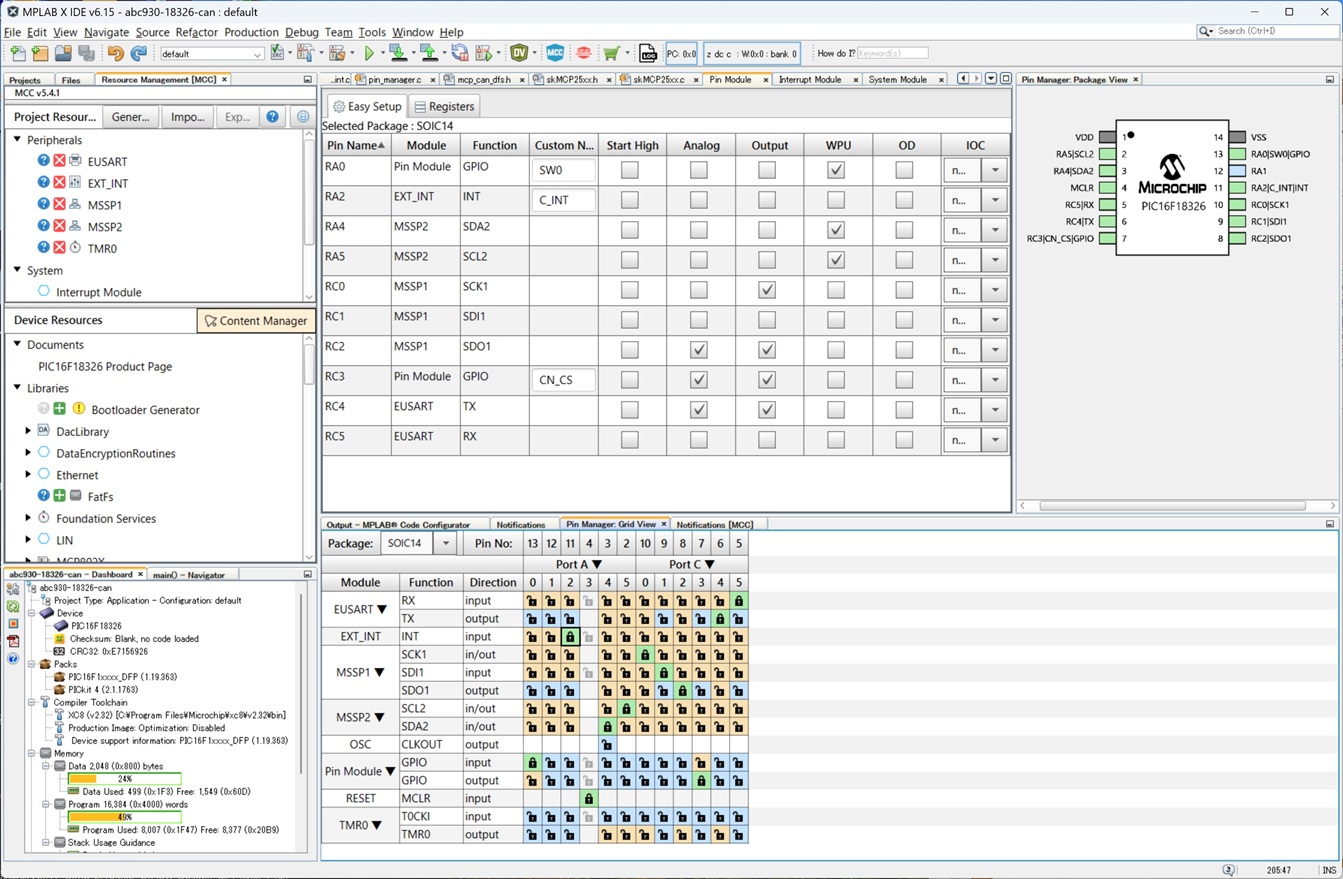 Pin Module |
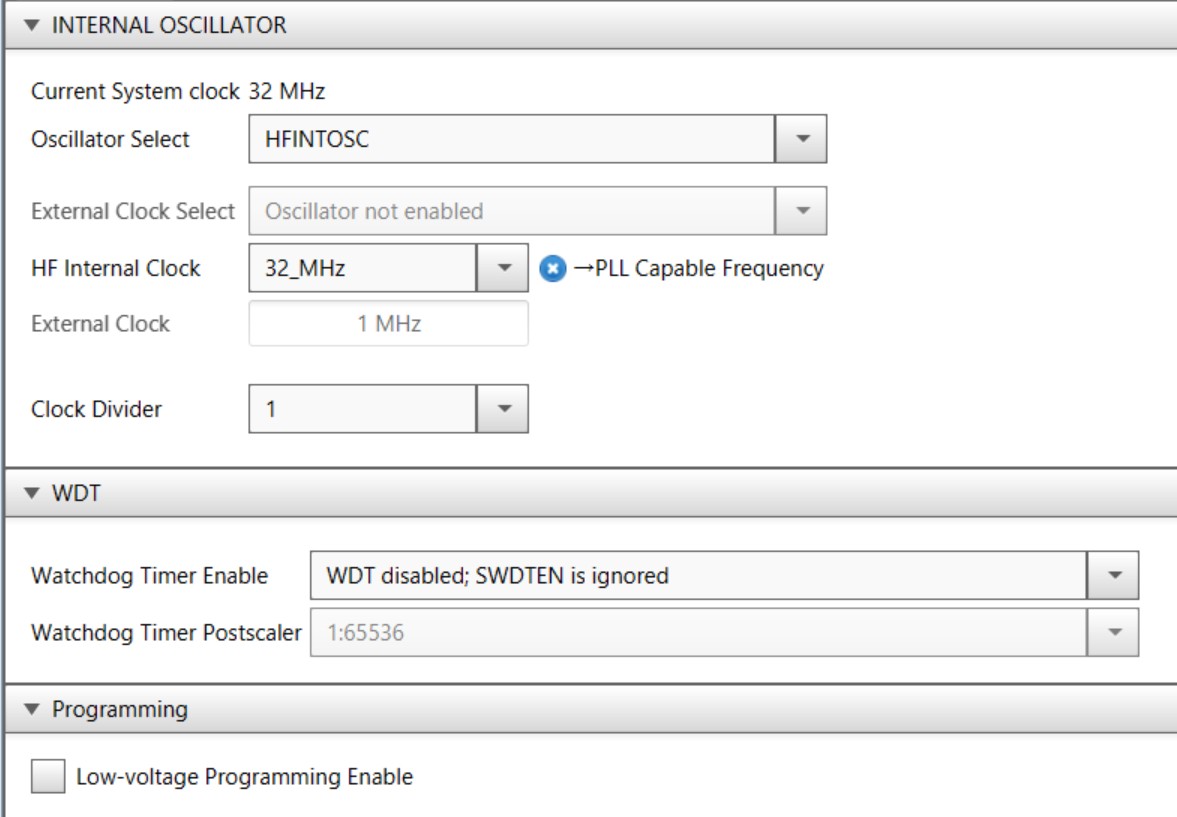 System Module 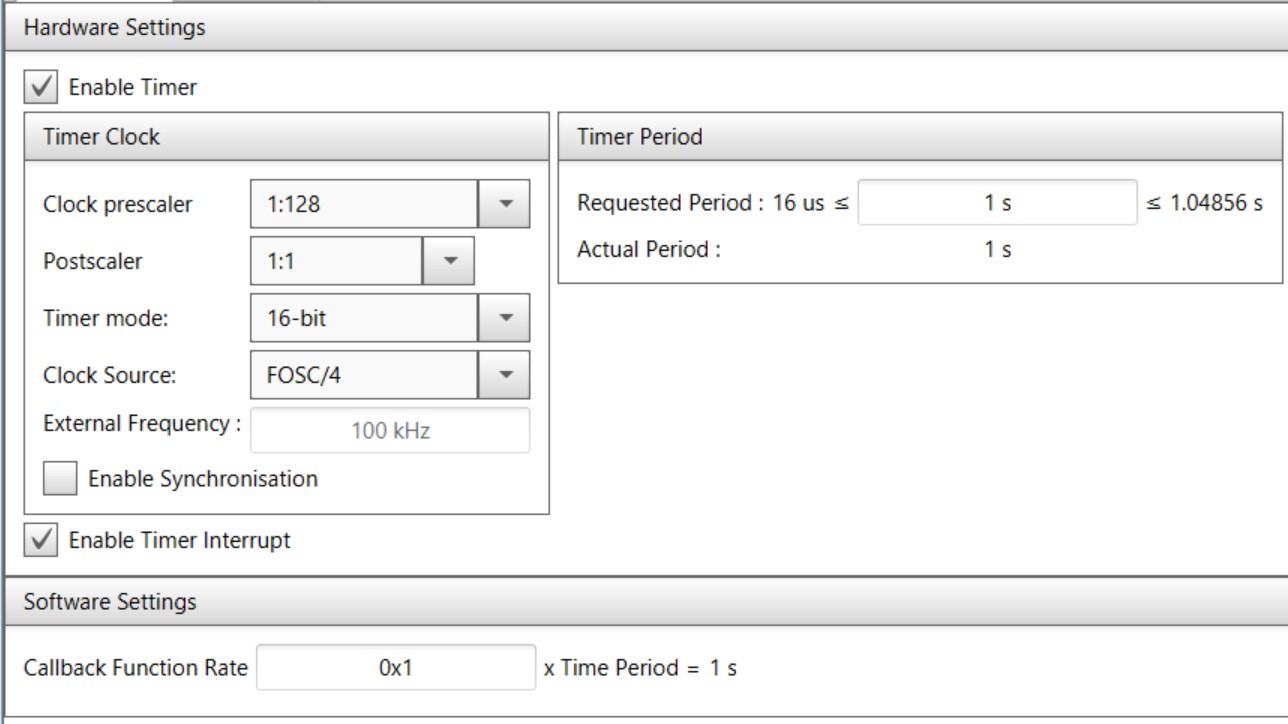 TMR0 Module |
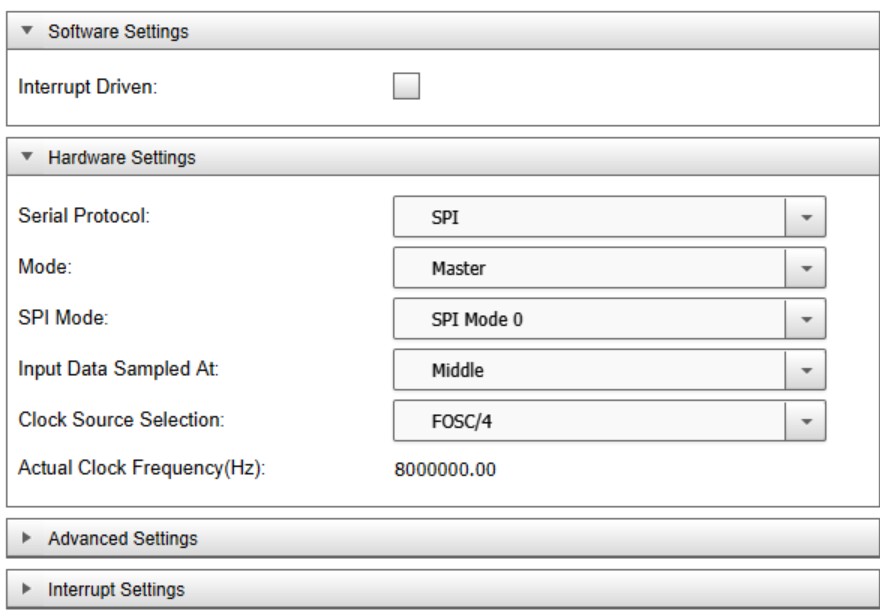 MSSP1�iSPI) Module |
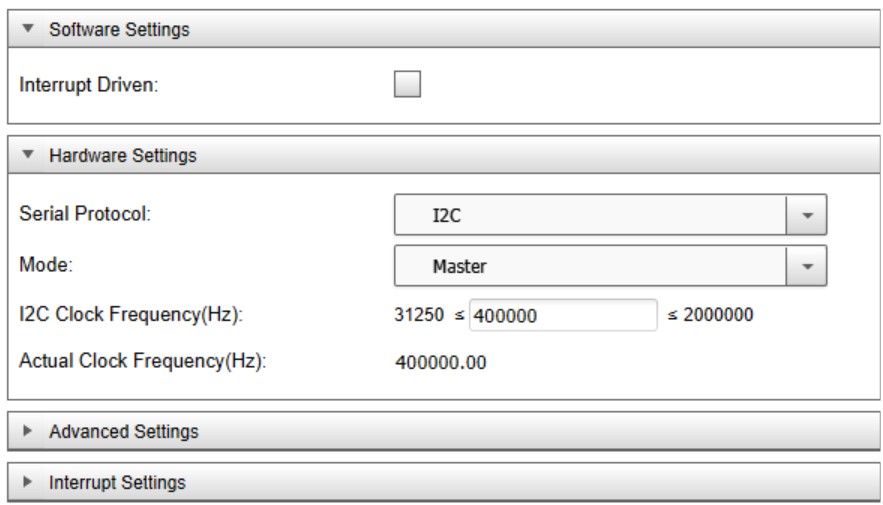 MSSP2�iI2C) Module |
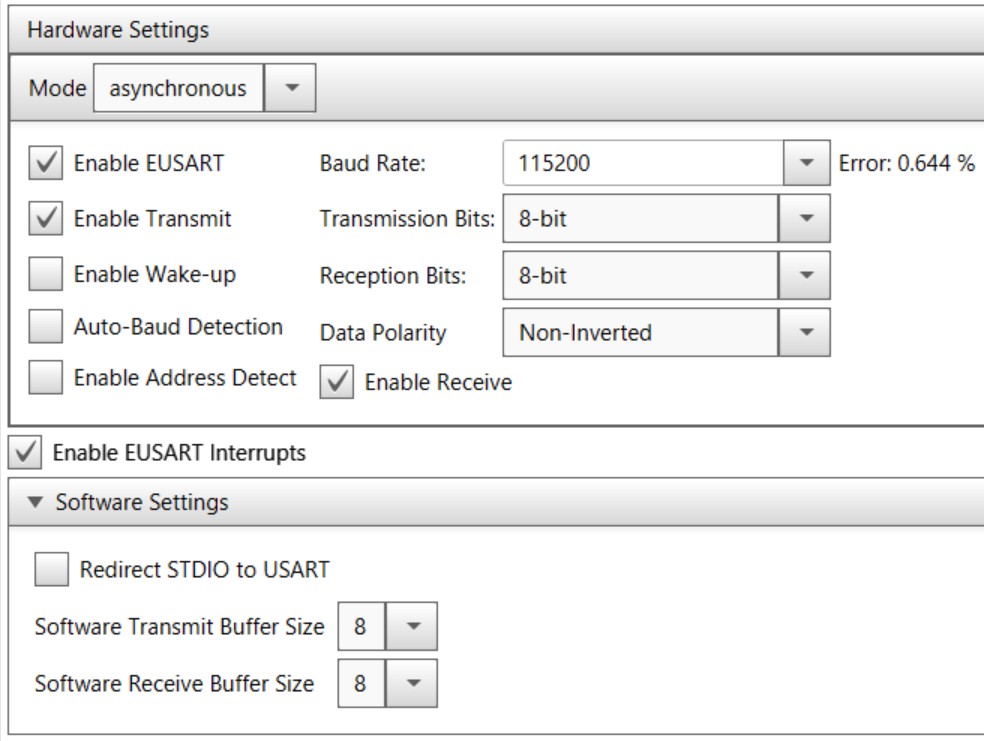 EUSART Module |
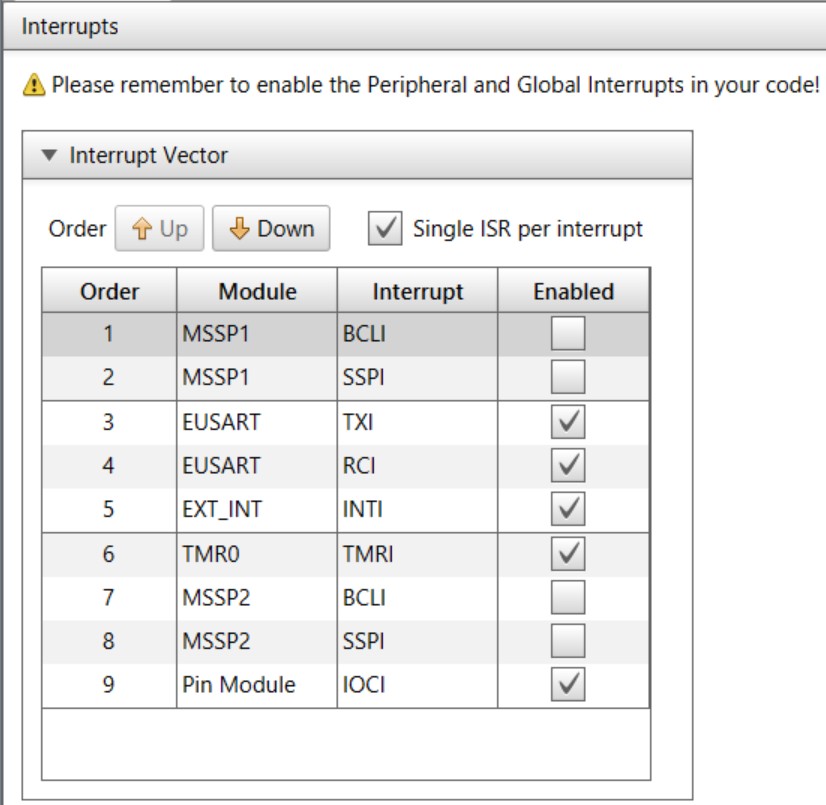 Interrupt Module |
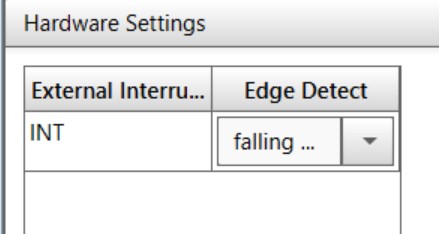 Exitint |
�y�e�X�g���ʁz
 CAN�e�X�g���i�S�́iCAN�P�[�u���͐��̃c�C�X�g�y�A�[�j |
�y�g���u���ƒ��ӓ_�z
![]()
| ���@�m�[�h�U�@��� �@ ��abc930-18326.c(zip) |
|---|
|
|
���V���A���R�}���h�� �s�F�@ ���x�f�[�^���uCAN���M����^���Ȃ��v��ύX �q�F�@ id = 0x123 �Ń����[�g�t���[�����M �rstr�F �R�}���h�ɑ����P������ id = 0x149 �ő��M |
�y���̑��̃v���O�����z
�y���܂��z�i11�^9�lj��j
�@�rstr �R�}���h�ŁA1���������łȂ��A(�ő�8�����́j�������CAN���M�ł���悤�ɂ����B
�@
�@
�@��abc930-18326S.zip�i�𓀂����t�@�C�����mabc930-18326.c�n�͓����Ȃ̂ŁA�u�������邱�Ɓj
| ���@�m�[�h�U(S)�@��� �@ |
|---|
|
�y���܂�(2)�z�i11�^18�lj��j
�@USB�ڑ��Ȃ��ł�����ł���悤�A�ȉ��̃X�C�b�`�������ƁA�ȉ��̓��������悤�ɂ����B
| ���@�m�[�h�U(W)�@��� �@ | |
|---|---|
|
 PIN_Module�mRA3��ėp���͂Ɂn �@ �@ RA3�iMCLR)��ėp���͂ɂ�����@��abc928���Q�� |
�y���܂�(3)�z�i11�^21�lj��j
�@CAN���MID��ύX�ł���悤�A�w�R�}���h��lj������B
| ���@�m�[�h�U(�w)�@��� �@ |
|---|
|
���v���O�����̃��X�g���n�C���C�g�����̃X�^�C���Ō���ꍇ���������N���b�N
�� �{���|�[�g�̎Q�l�E���p�́A�����܂ł����ȐӔC�ł��肢���܂��B
 |
 |
 |
