W Windows11でネットワーク上のデバイスが表示されない
by fjk
Windowsでネットワーク上にあるパソコンやプリンタを共有することができるが、Windows10(22H2)ではNAS(LS-XL89D)も含めて、問題なくアクセスできていたのに、Windows11(24H2)では、デバイスのアイコンも表示されなくなった。
これは、PCの故障ではなく、ネットワーク検索など、Windowsの設定(仕様)が変更されたためで、特に古い規格であるSMB1.0は、デフォルトで使用できなくなっている。
他にも、変更された所が幾つかあるようで、以下を参照に、設定を変更してみた。
- ① 「ネットワーク上の共有PCやプリンタが表示されない」
- ② 「ネットワーク上のデバイスが表示されない原因と対処法」
- ③ 「パソコンのインターネット接続が不安定なときに試してほしいネットワークのリセット方法」
- ④ 「Windowsのファイルとフォルダの共有設定」
この様な症状時の対策は、
- ・ネットワーク探索を有効にする
- ・ファイルとプリンターの共有を有効にする
- ・ネットワークをプライベートネットワークに変更する
- ・WindowsDefenderファイアウォールでネットワークの探索を許可する
- ・SMB1.0を有効にする
①で指摘のあった、上記の設定を全て確認・変更を行って、PCを再起動してみたが、それでも、デバイスのアイコンが表示されなかった。
そこで、②に記載の「ネットワークの設定をリセットする」(詳細は③を参照)を実行し、PCを再起動したところ、ネット接続中のPCのアイコンは表示されるようになった。しかし、古いNAS(LS-XL89D)のアイコンはSMB1.0を有効にしても表示されなかった。
さらに、windows11では、共有アクセス時に資格情報(ユーザー名/パスワード)を要求する仕様が強化されたようで、「ユーザーアカウント」→「資格情報マネージャー」からLS-XL89Dの資格情報を設定してみたが・・、アイコンは表示されなかった。
SMB2/3対応のNASに変更するしか無いのかな・・・。
- ・「共有フォルダにアクセスできない原因と対処法」
- ・「共有フォルダにアクセスできない:資格情報が求められるときの対処法」
ここまでで、一応、他のPCのアイコンが「ネットワーク画面」に表示されるようになったので、④を参照に、「ファイルの共用」を設定すると、2つのPC間でファイルの共用が出来るようにはなった。
- Windows10でもabc771で紹介したようにNAS接続エラーの例があったので、ワークグループの設定でグループ名も合わせてみたが、Windows11のネットワークではLS-XL89Dのアイコンは表示されなかった。
- Windows11の「ネットワーク」ではLS-XL89Dを検出できなかったが、BuffaloのNAS_Navigater2をインストールすると、Windows11でLS-XL89Dがチャンと認識され、ファイルの共用が可能となった。
・NAS_Navigater2入手先
LS-XL89Dはかなり古いので、今後の故障等を考慮して、新しいNASとしてLS710D040を入手した。
- LS710D040とLS-XL89Dを同じネットワークに繋ぐと、Windows11ではどちらのNASのアイコンもネットワーク画面に表示されなかったが、NAS_Navigater2では両方のアイコンが表示された。
- LS-XL89Dはアイコンのクリックで共有できたが、LS710D040のアイコンをクリックしても応答無く、接続できなかった。
これは、Windows11ではネットワーク資格情報が強化され、SMB署名が必要になったためで、ゲストログオンでは、SMB署名を利用できないため、共有フォルダーを開くことができなくなった。
- そこで、LS710D040のアイコンを右クリックし、「Web設定画面」から、「ユ-ザ-設定」で「作成」をクリックし、新規にユーザ名とパスワードを設定。
- さらに、「ファイル共有」「SMB」「ネットワーク資格情報」で「資格情報の入力画面を表示する」に設定。
- そして、NAS_Navigator2画面でLS710D040のアイコンをクリックすると、ユーザー名とパスワード入力画面が表示され、必要な情報を入力すると、共有フォルダーに接続でき、ファイル共有が出来るようになった。
- なお、LS-XL89Dは資格情報の入力が必要なく、アイコンをクリックするだけで、ファイルの共有ができた。
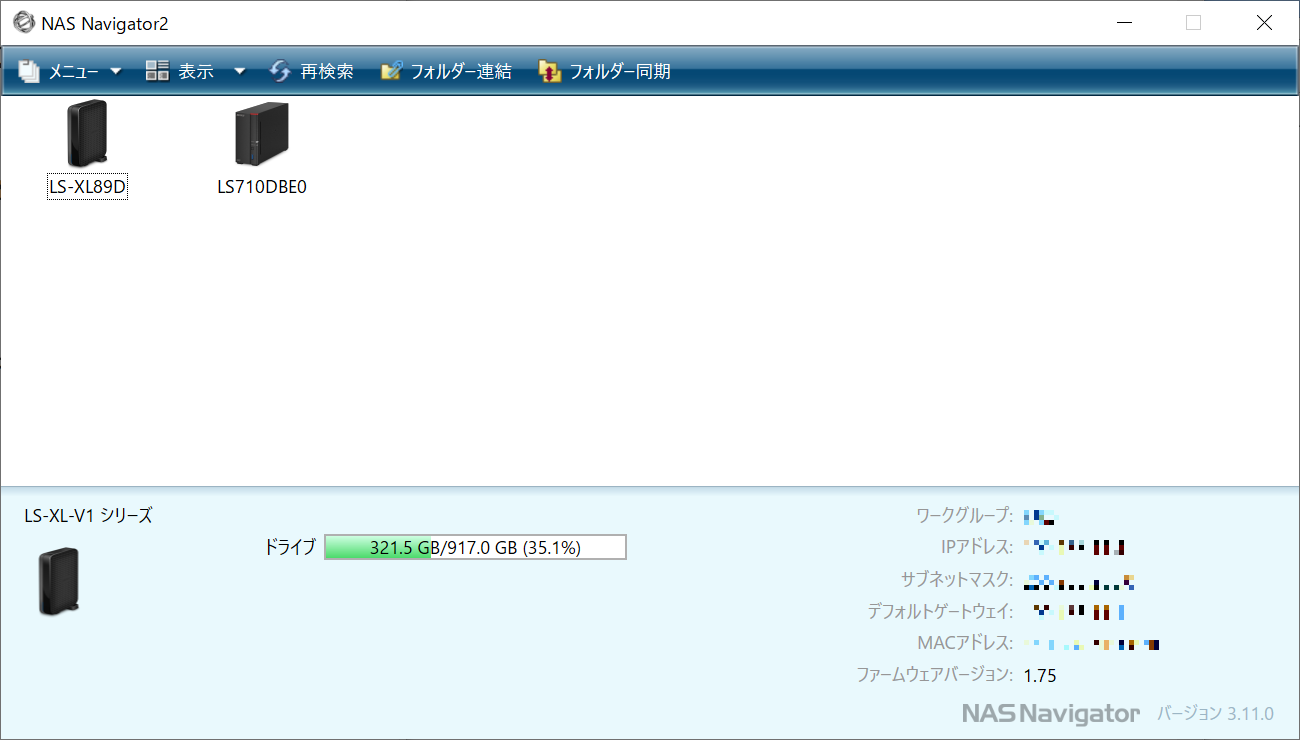
NAS Navigator2 画面
|
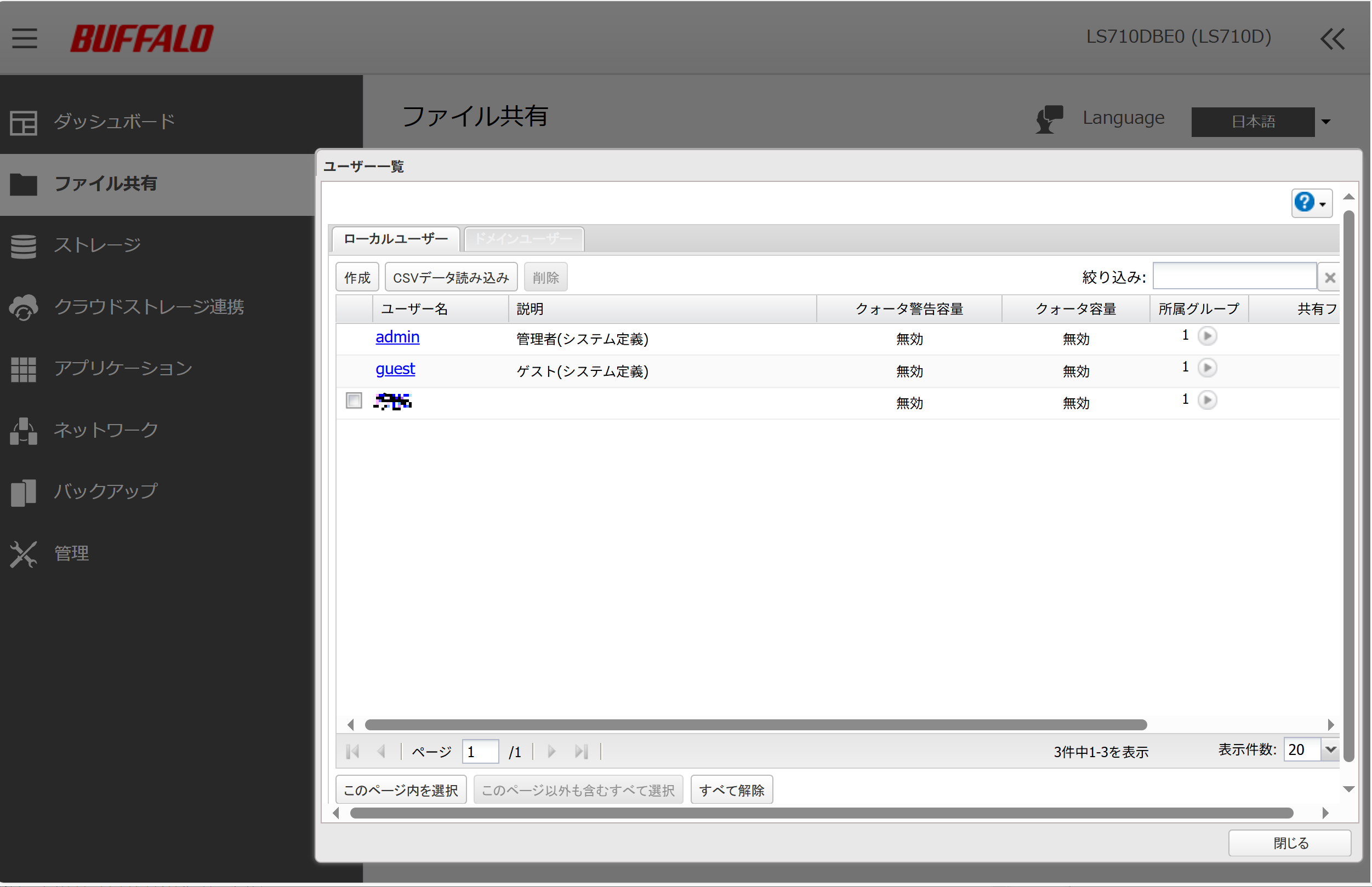
ファイル共有/ユーザー 設定画面
|
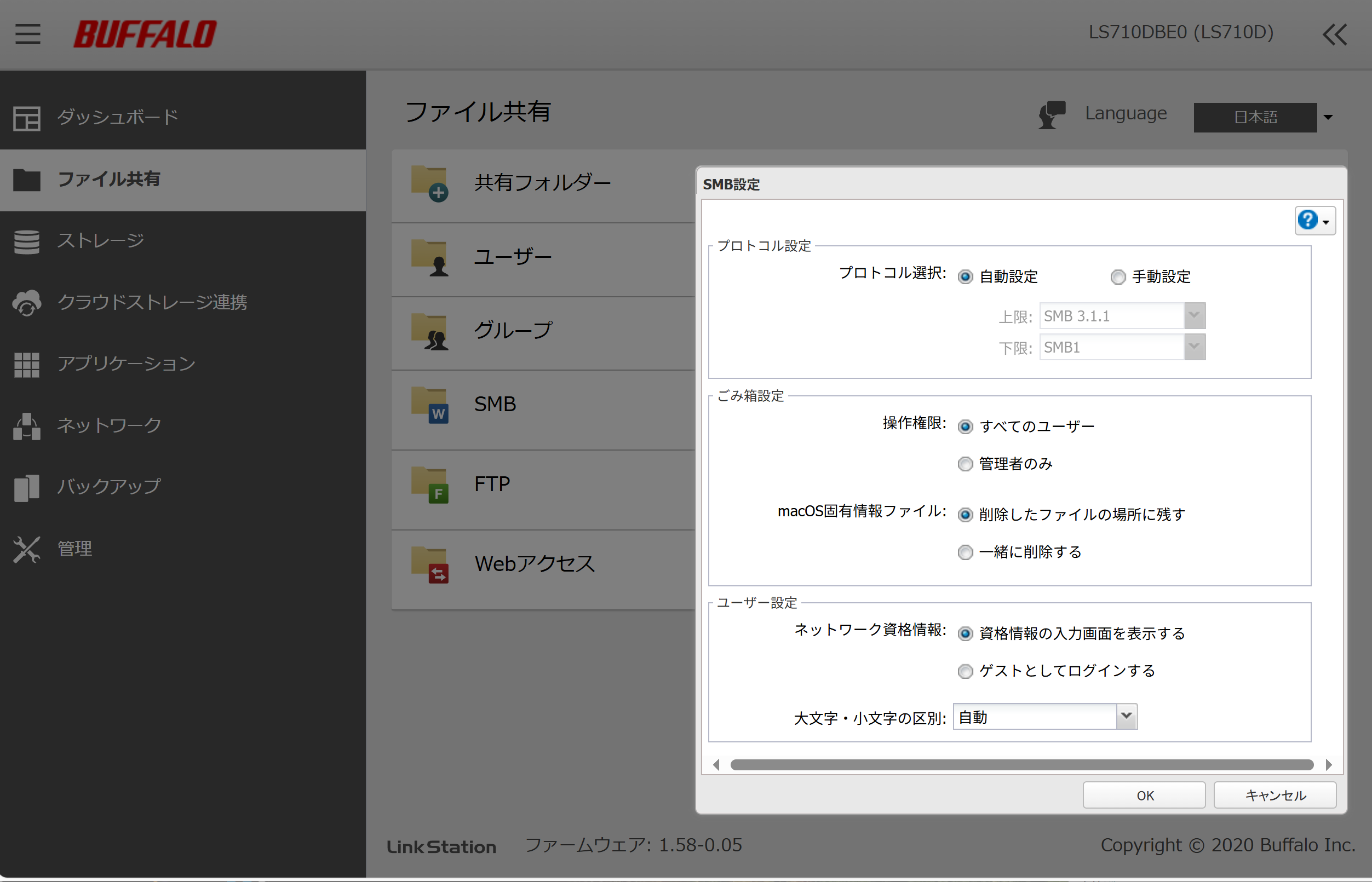
ファイル共有/SMB 設定画面
|

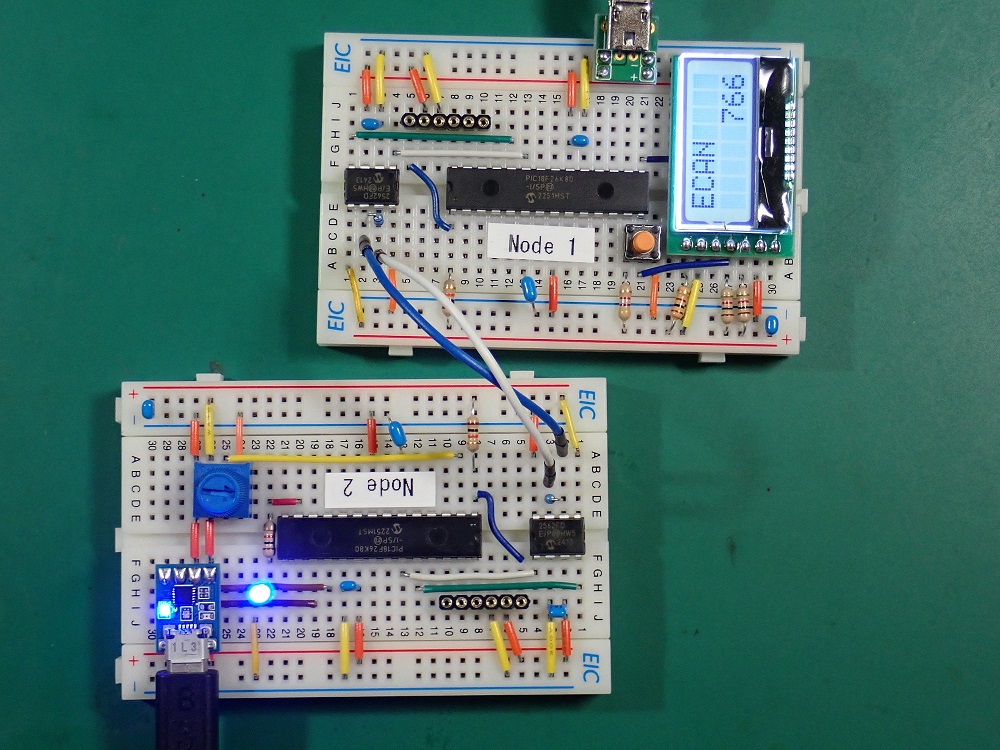
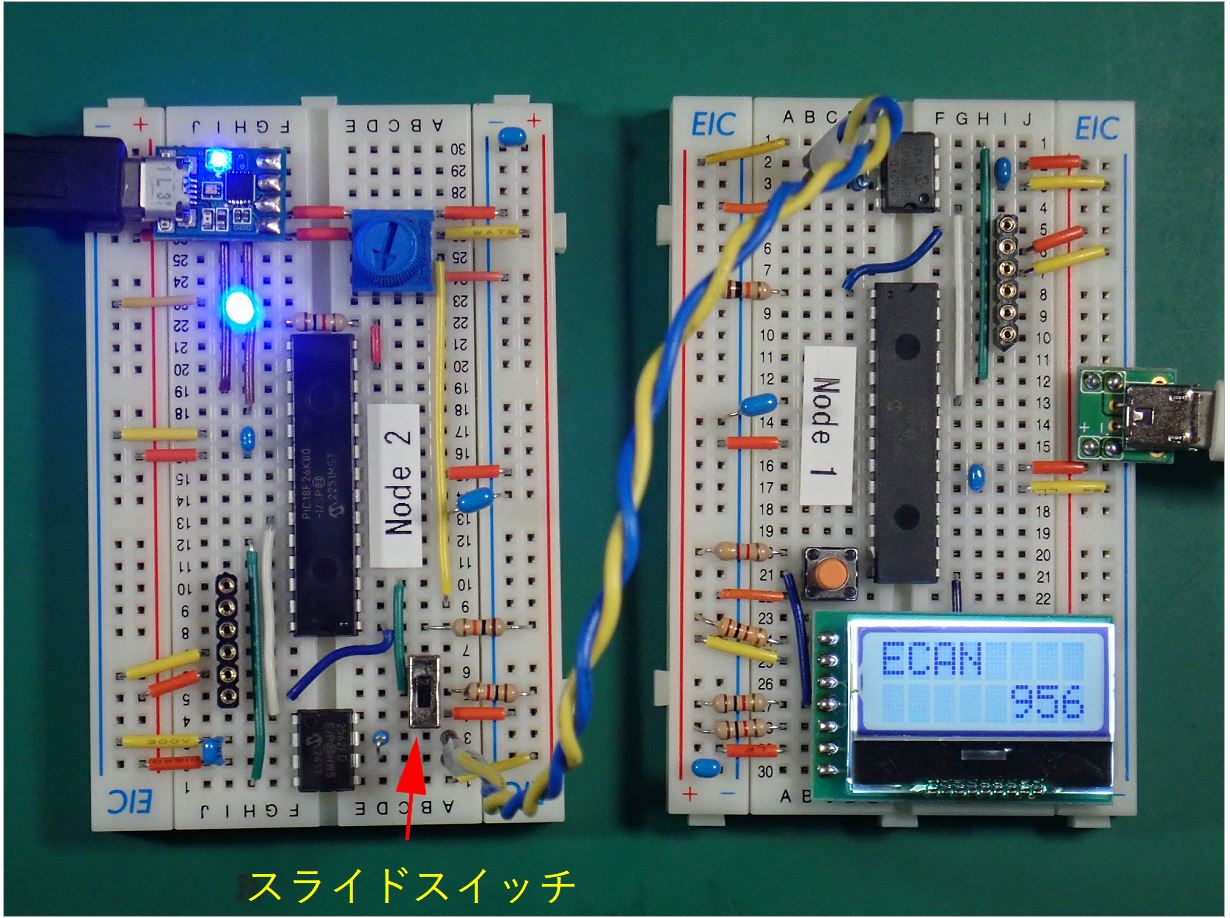
≪≪ ノード1 ≫≫
▼abc927-26k80-1.zip
| |
≪≪ ノード2 ≫≫
▼abc927-26k80-2.zip
|
|---|
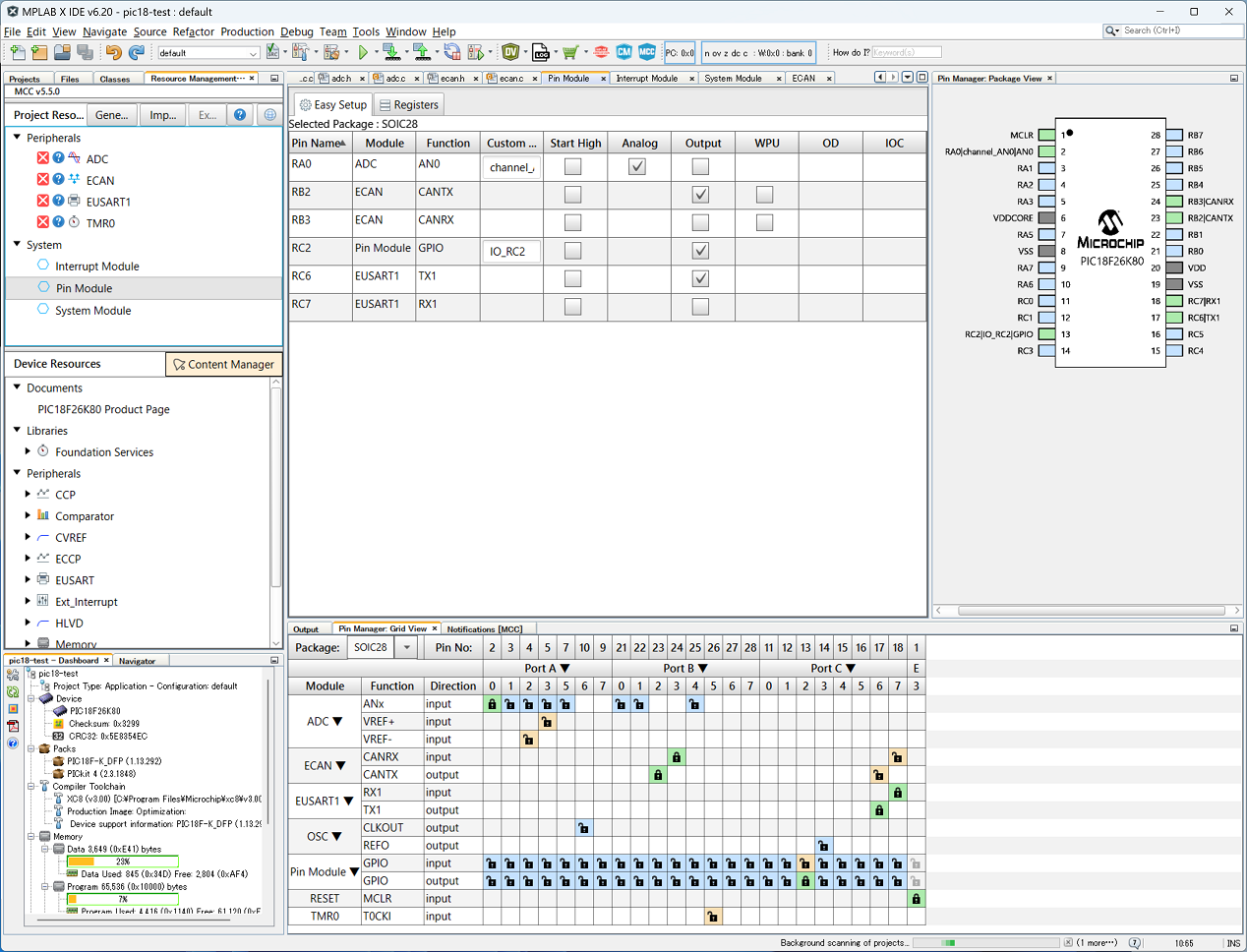
/**********************(abc927-26K80-1.c)************
* ECAN テスト ノード1 (PIC18F26K80)
*****************************************************/
#include "mcc_generated_files/mcc.h"
#include "mcc_generated_files/ecan.h"
#include "i2c_LCD_lib.h"
//------ 共通変数の宣言
uCAN_MSG rxMessage ; // 受信メッセージバッファ
//------ 受信の処理
void processRxMessage(void) {
union {
unsigned char c[2] ;
unsigned int i ;
} data ;
char buf[12] ;
// 標準の識別子IDか?
if (rxMessage.frame.idType == dSTANDARD_CAN_MSG_ID_2_0B) {
switch (rxMessage.frame.id) {
case 0x123 :
data.c[0] = rxMessage.frame.data0 ;
data.c[1] = rxMessage.frame.data1 ;
sprintf(buf,"%8d",data.i) ;
LCD_cursor(0,1) ; // LCDの2行目に表示
LCD_str(buf) ;
break ;
default :
LCD_cursor(0,1) ;
LCD_str("Unknown ") ;
break ;
}
}
}
/***********************************************
* Main application
************************************************/
void main(void)
{
uint8_t rc;
SYSTEM_Initialize();
LCD_init();
INTERRUPT_GlobalInterruptEnable();
INTERRUPT_PeripheralInterruptEnable();
LCD_str("ECAN");
LCD_cursor(0,1); LCD_str(" TEST");
while (1) {
if ( CAN_receive(&rxMessage)) {
// 受信したら処理を行う
processRxMessage() ;
}
}
}
/******* End of File ********/
|
|
/**********************(abc927-26K80-2.c)************
* ECAN テスト ノード2 (PIC18F26K80)
***************************************************/
#include "mcc_generated_files/mcc.h"
#define EU_BFSIZE 120
#define DBF_SIZE 512 // File/Memory用BFサイズ
#define MBF_SIZE 64 // メッセージ用BFサイズ
/***** グローバル変数 ***************************/
//--- タイマー用変数
uint8_t TFlg; // タイマーフラグ
//----- EUSARTシリアル用
char RBuf[EU_BFSIZE]; // 受信文字Buffer
uint8_t SFlg; // 受信フラグ
static uint8_t sIdx = 0; // 受信文字列Index
//---- 汎用データ処理用
char Msg[MBF_SIZE]; // コメント等送信用文字列
//---- CANデータ処理用
uCAN_MSG txAdcResult ; // 送信メッセージバッファ
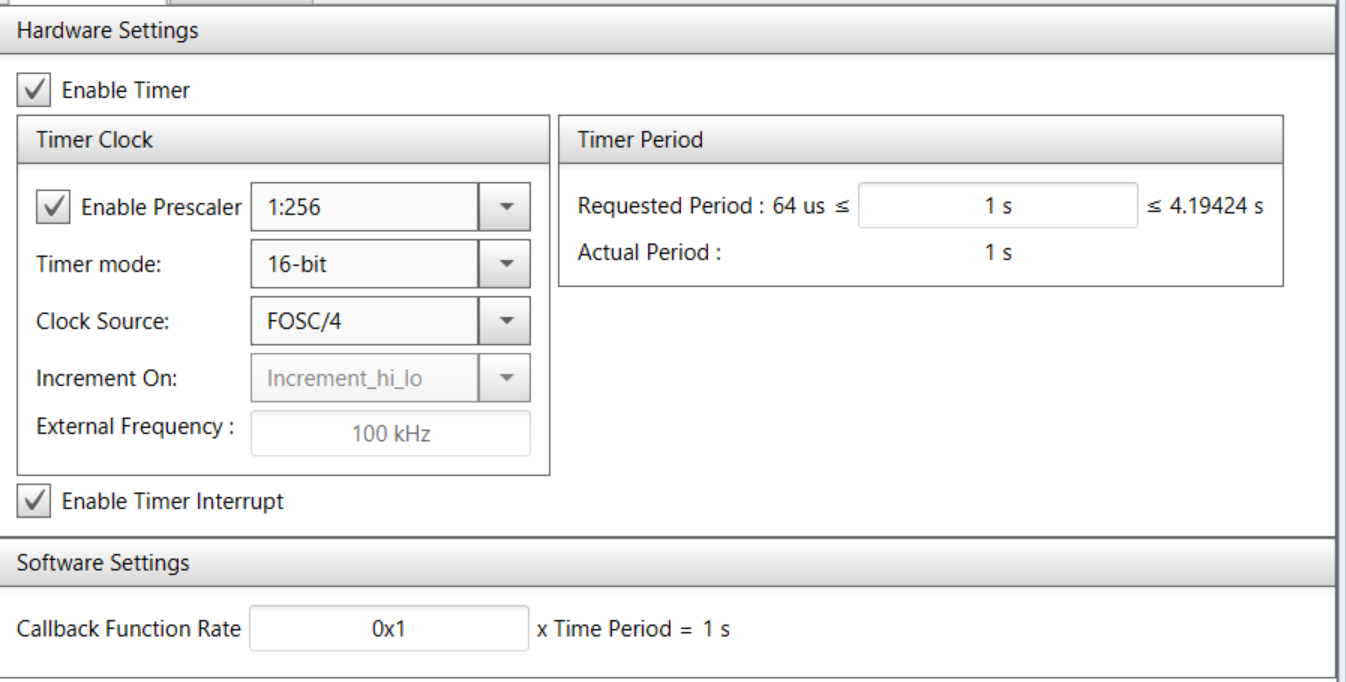
/************************************************
* タイマ0 Callback関数 (1秒周期割り込み) *
************************************************/
void TMR0_Process(void){
TFlg = 1; // タイマーフラグセット
}
/*=== Eusart受信割り込みハンドラー =============*
* eusrt.cのEUSART_Recive_ISRに追加すること *
*---------------------------------------------*/
void myEusart(void){
char ch;
ch = (char)EUSART1_Read();
#if ECHO == ON
EUSART1_Write(ch);
#endif
if((ch == 0x0a)||(ch == 0x0d)){ // 改行処理
RBuf[sIdx] = 0;
sIdx = 0;
SFlg = 1;
}else if((ch == 0x08)&&(sIdx > 0)){ // BS処理
sIdx--;
}else{
if(sIdx < EU_BFSIZE) RBuf[sIdx++] = ch;
}
}
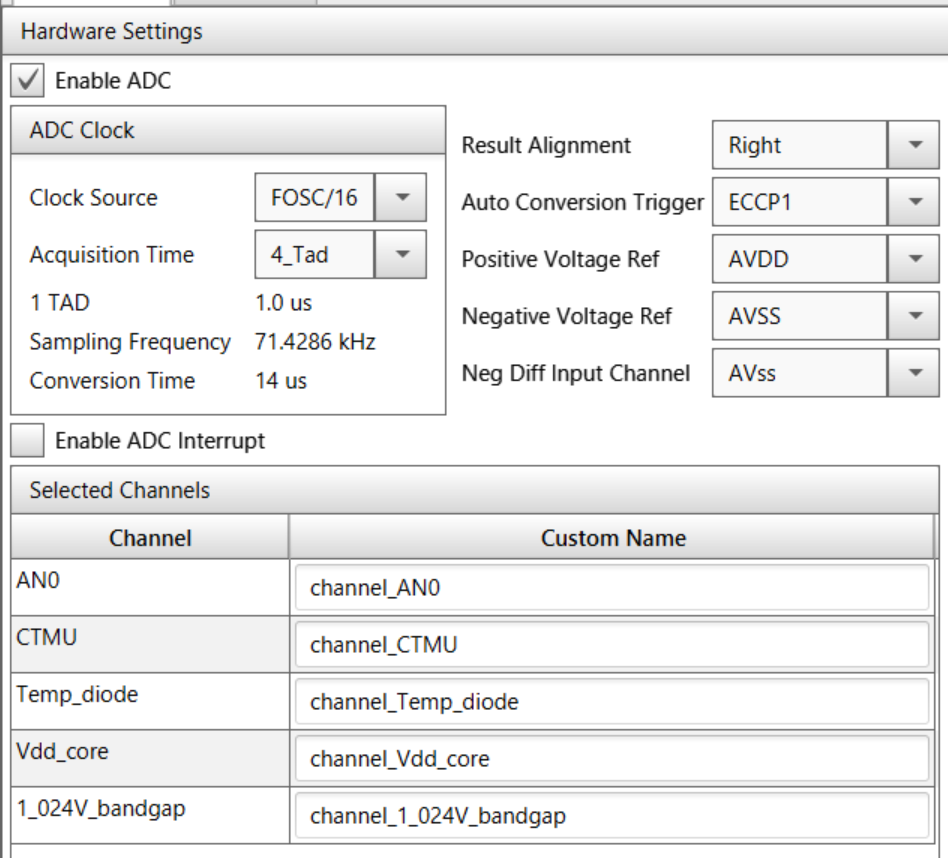
uint16_t ad_conv(void){
ADCON0bits.GO_nDONE = 1; // Start the conversion
while (ADCON0bits.GO_nDONE);
return ((uint16_t)((ADRESH << 8) + ADRESL));
}
/***********************************************
* Main application
***********************************************/
void main(void){
union { unsigned char c[2] ;
unsigned int i ; } data ;
SYSTEM_Initialize();
TMR0_SetInterruptHandler(TMR0_Process); // Timer0 Callback関数
INTERRUPT_GlobalInterruptEnable();
INTERRUPT_PeripheralInterruptEnable();
IO_RC2_SetHigh();
puts("--- start ---\n");
__delay_ms(3000);
while (1) {
if(TFlg){
IO_RC2_Toggle();
TFlg = 0;
data.i = ad_conv();
printf("%d\n",data.i);
txAdcResult.frame.idType = dSTANDARD_CAN_MSG_ID_2_0B ;
txAdcResult.frame.id = 0x123 ;
txAdcResult.frame.dlc = 2 ;
txAdcResult.frame.data0 = data.c[0] ;
txAdcResult.frame.data1 = data.c[1] ;
CAN_transmit(&txAdcResult) ; // メッセージデータを送信
}
if(SFlg){
printf("%s\n",RBuf);
}
SFlg = 0;
}
}
/******* End of File ********/
|
| |
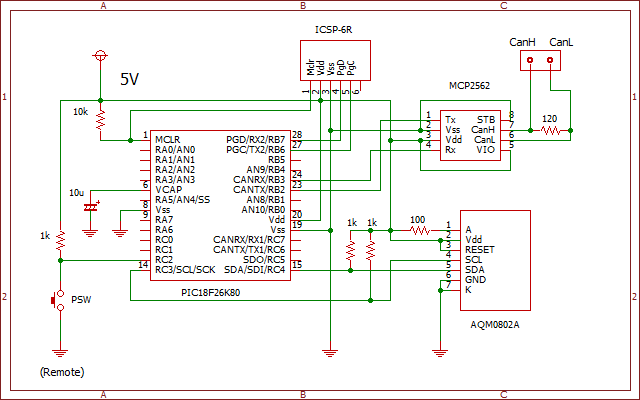
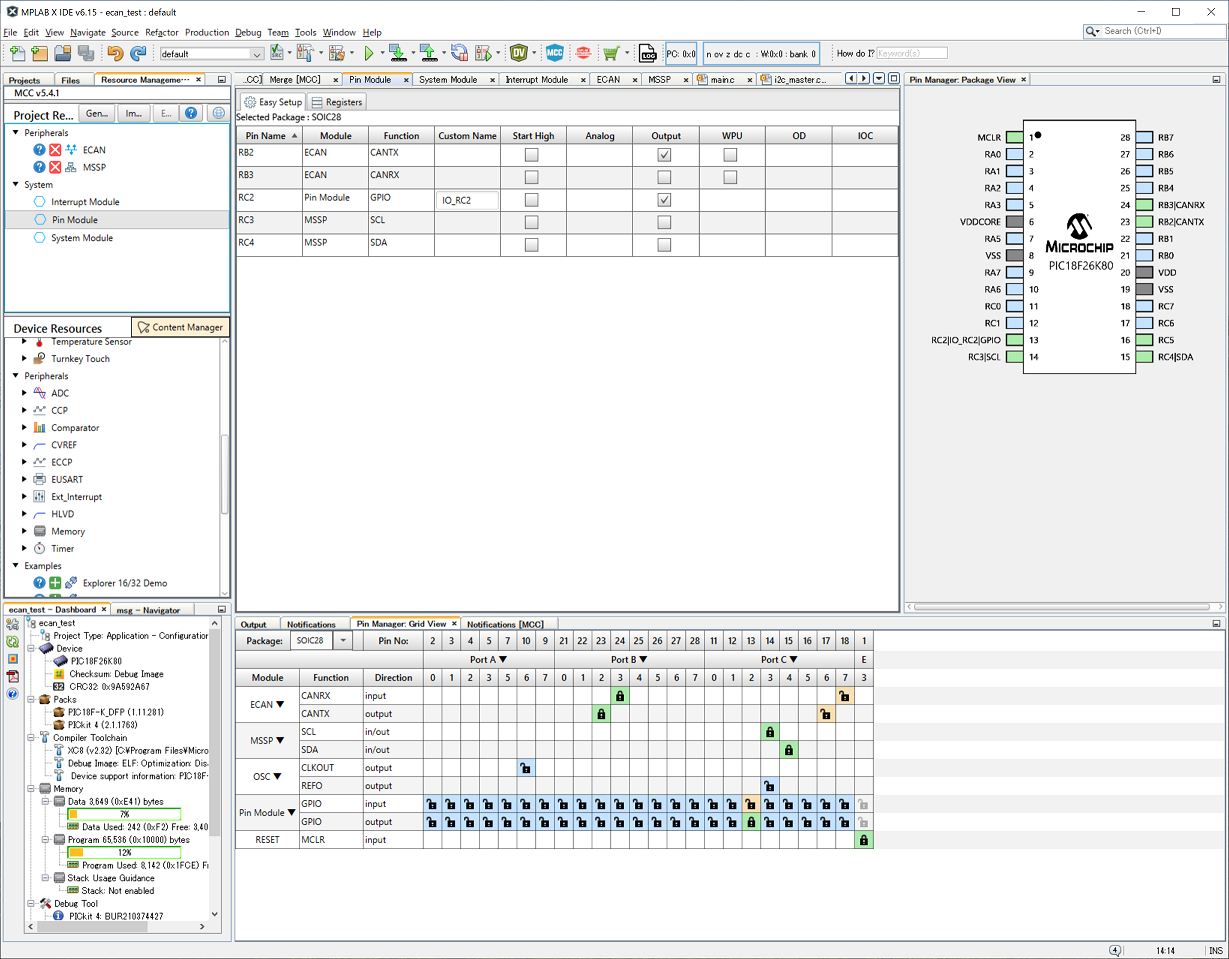
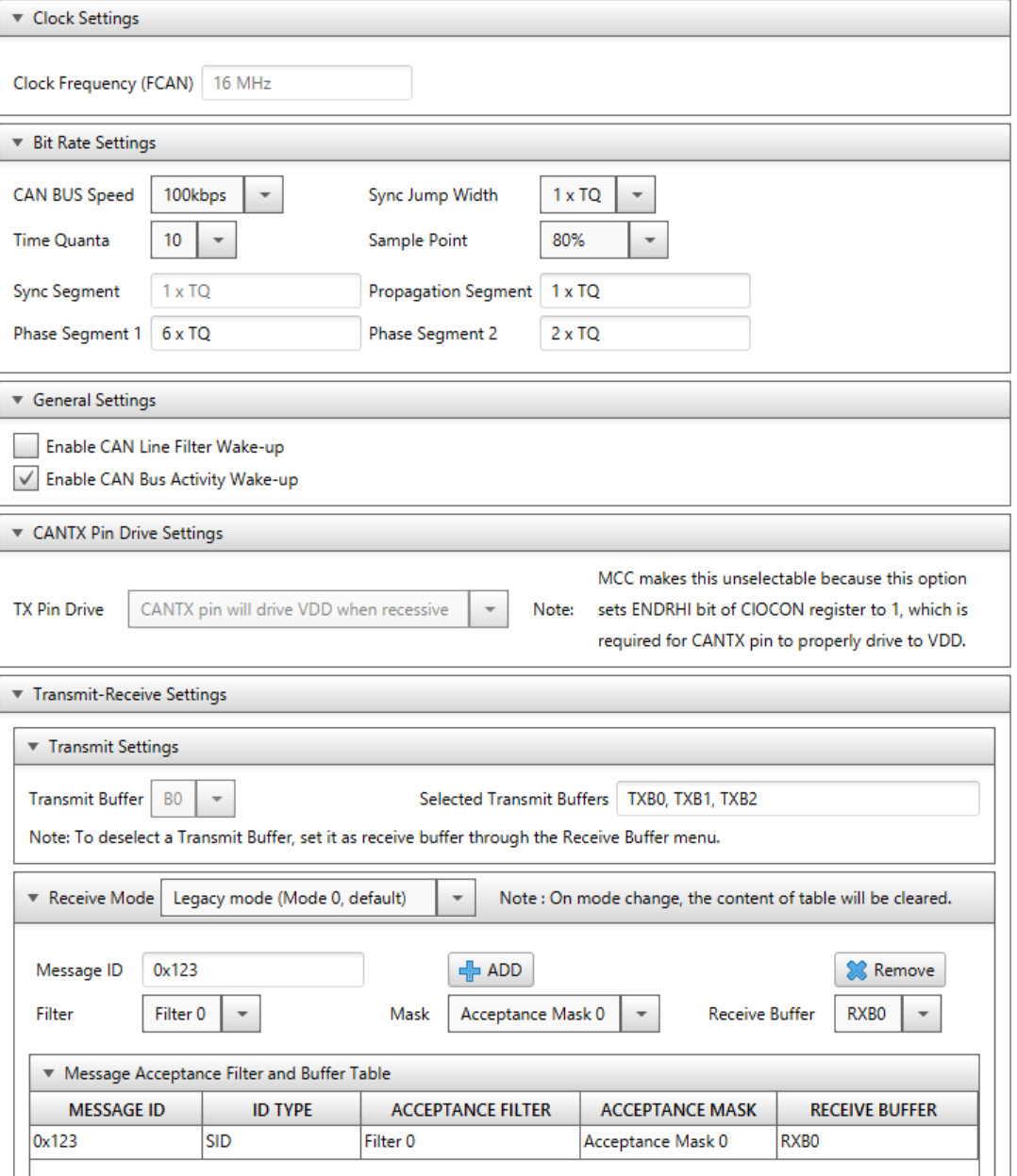
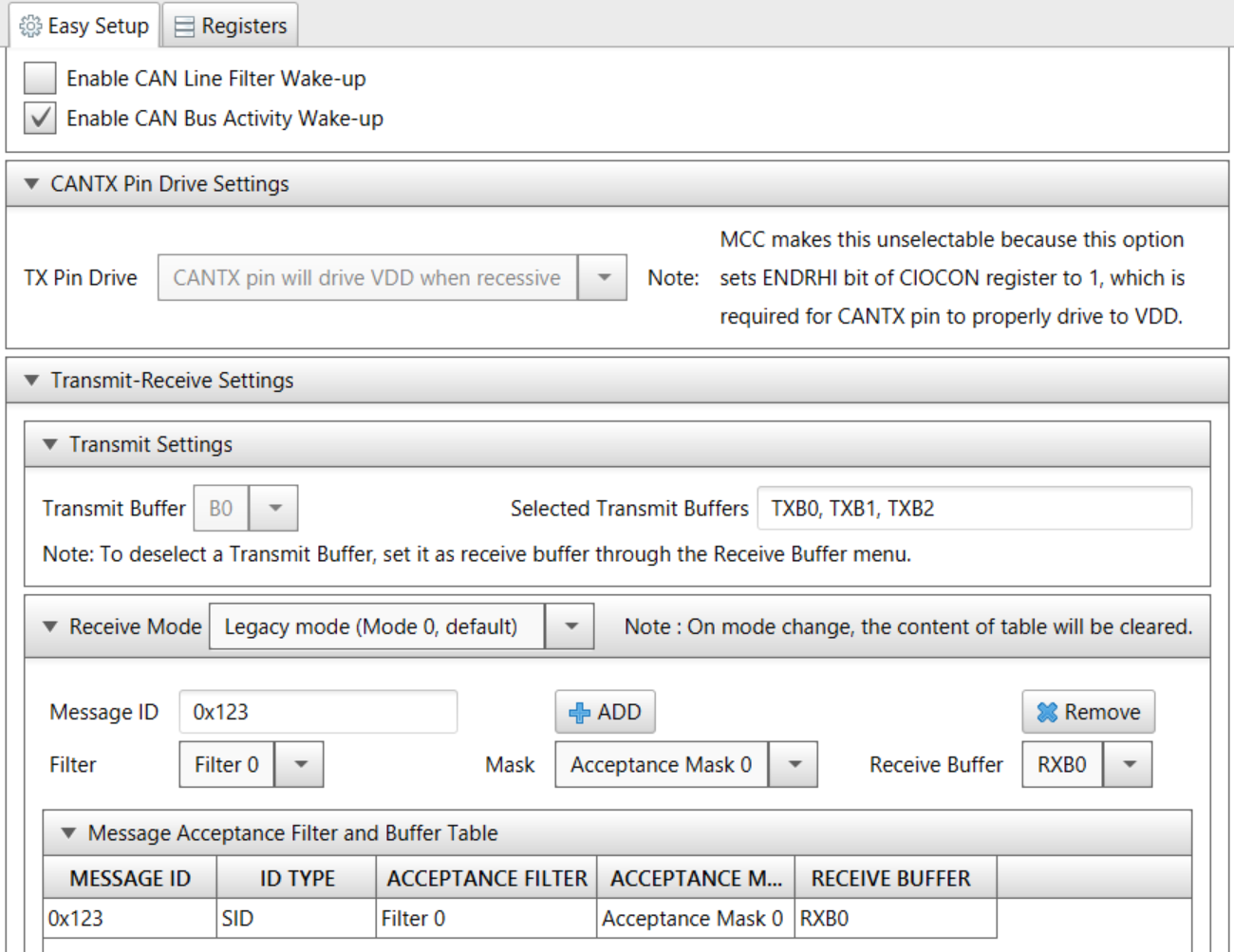
<< ECAN設定時のレジスタ値(参考) >>
/********************(ecan.c)************/
・・・
void ECAN_Initialize(void)
{
CANCON = 0x80;
ECANCON = 0x00;
CIOCON = 0x20; // MCCでは0x00となることがある
BRGCON1 = 0x07;
BRGCON2 = 0xA8;
BRGCON3 = 0x01;
・・・
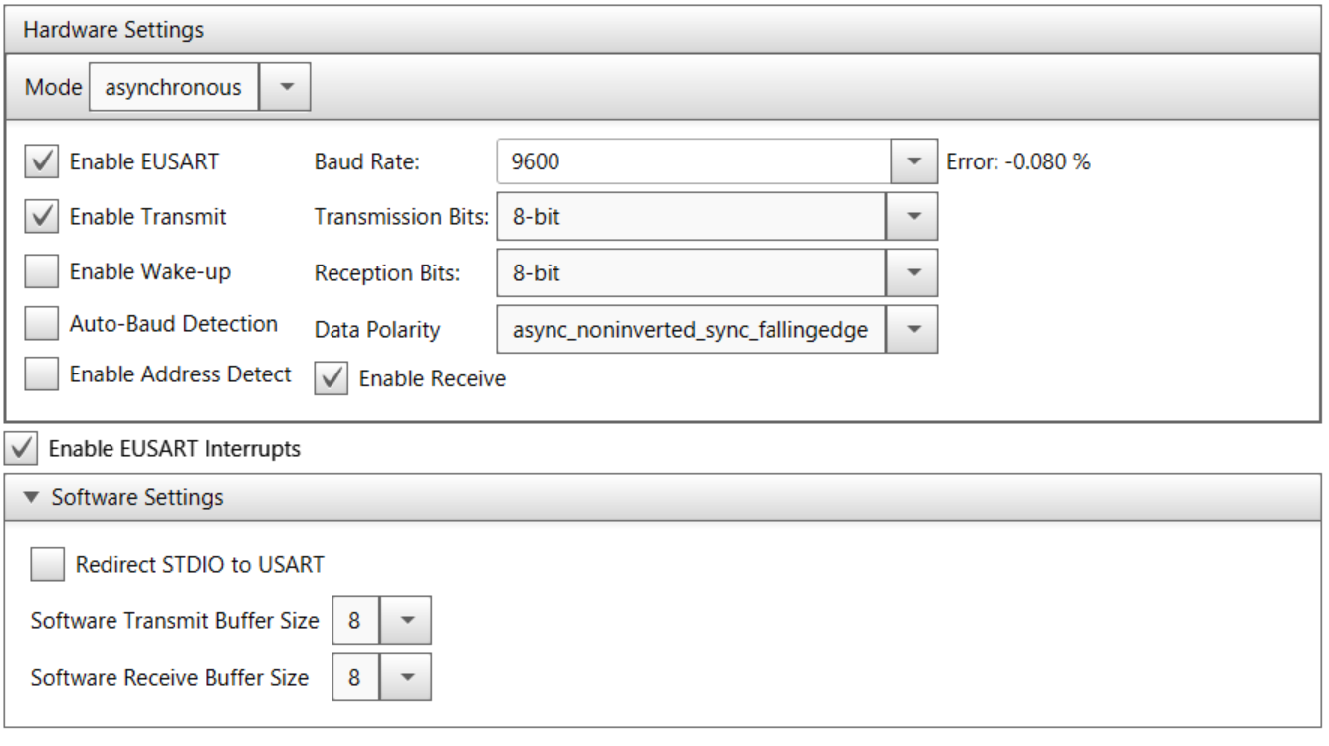
<< ノード2用EUSART.C >> (赤字を追加)
/*******************(usart1.c)*******/
void myEusart(void);
・・・
void EUSART1_Receive_ISR(void)
{
・・・
myEusart();
}
|
【おまけ】(デ-タ+リモート)
≪≪ ノード1 ≫≫(一部を抜粋)
▼abc927-26k80-1R.zip
| |
≪≪ ノード2 ≫≫(一部を抜粋)
▼abc927-26k80-2R.zip
|
|---|
/**********************(abc927-26K80-1R.c)************
* ECAN テスト
*****************************************************/
・・・・・
// 共通変数の宣言
uCAN_MSG txAdcResult ; // 送信メッセージバッファ
uCAN_MSG rxMessage ; // 受信メッセージバッファ
・・・・・
char msg[8];
// 受信の処理
・・・・・
/***********************************
* Main application
************************************/
void main(void){
uint8_t rc;
SYSTEM_Initialize();
LCD_init();
INTERRUPT_GlobalInterruptEnable();
INTERRUPT_PeripheralInterruptEnable();
LCD_str("ECAN");
LCD_cursor(0,1); LCD_str(" TEST");
while (1) {
// スイッチが押されたらリモートフレームをを送信する
if (RC2_GetValue() == 0) {
__delay_ms(100); // チャタリング防止に1秒程待つ
// 送信メッセージデータを作成する
txAdcResult.frame.idType = dSTANDARD_CAN_MSG_ID_2_0B ;
txAdcResult.frame.id = 0x123 ;
txAdcResult.frame.dlc = 0x40 ; // リモートフレーム送信要求
CAN_transmit(&txAdcResult) ; // メッセージデータを送信する
}
if ( CAN_receive(&rxMessage)) { // 受信したら処理を行う
processRxMessage() ;
}
}
}
/*************** End of File ******************/
|
|
/**********************(abc927-26K80-2R.c)************
* ECAN テスト
*****************************************************/
・・・・・
// 共通変数の宣言
uCAN_MSG txAdcResult ; // 送信メッセージバッファ
uCAN_MSG rxMessage ; // 受信メッセージバッファ
・・・・・
// 受信の処理
void processRxMessage(void) {
union {
unsigned char c[2] ;
unsigned int i ;
} data ;
// 標準の識別子IDか?
if (rxMessage.frame.idType == dSTANDARD_CAN_MSG_ID_2_0B) {
// リモートフレームの送信要求か?
if ((rxMessage.frame.dlc & 0x40) == 0x40) {
switch (rxMessage.frame.id) {
case 0x123 :
// 半固定抵抗の値を読み込む
data.i = ad_conv() ;
// 送信メッセージデータを作成する
txAdcResult.frame.idType = dSTANDARD_CAN_MSG_ID_2_0B ;
txAdcResult.frame.id = 0x123 ;
txAdcResult.frame.dlc = 2 ;
txAdcResult.frame.data0 = data.c[0] ;
txAdcResult.frame.data1 = data.c[1] ;
// メッセージデータを送信する
CAN_transmit(&txAdcResult) ;
break ;
default :
break ;
}
}
}
}
/***********************************
* Main application
************************************/
void main(void){
・・・・・
while (1) {
if (CAN_receive(&rxMessage)) {
// 受信したら処理を行う
processRxMessage() ;
}
・・・・・
}
/*************** End of File ******************/
|
★もし、delaey関数がC99でエラーとなる場合、以下のマクロ記述を追加
/****** Delay Macros **************************
* NOTE: C99 requires macro declarations *
************************************************/
#define __delay_us(x) _delay((uint32_t)((x)*(_XTAL_FREQ/4000000.0)))
#define __delay_ms(x) _delay((uint32_t)((x)*(_XTAL_FREQ/4000.0)))
|
【その他のプログラム】
- ▼ i2c_LCD_lib.c/.h(zip)
- ※ EUSARTの設定についてはabc917等を参照
※プログラムのリストをハイライト付きのスタイルで見る場合はここをクリック
※ 本レポートの参考・利用は、あくまでも自己責任でお願いします。