


「小型家電リサイクル法」は、デジタルカメラやゲーム機等の使用済小型電子機器等の再資源化を促進するため、主務大臣による基本方針の策定及び再資源化事業計画の認定、当該認定を受けた再資源化事業計画に従って行う事業についての廃棄物処理業の許可等に関する特例等について定めた法律です。
【参考】
【富山県の認定事業者】
なお、富山市では「資源物ステーション」に小型家電を持ち込むことができます。
前報(abc926)でCAN通信のおおよそが判ったので、PICでCAN通信の実験を行った。
参考にさせていただいたのは「PICとPICでECAN通信の実験」(「きむ茶工房ガレージハウス」さん)で、オリジナルから以下の変更を行った。
(両方ともPIC18F26K80を使用)
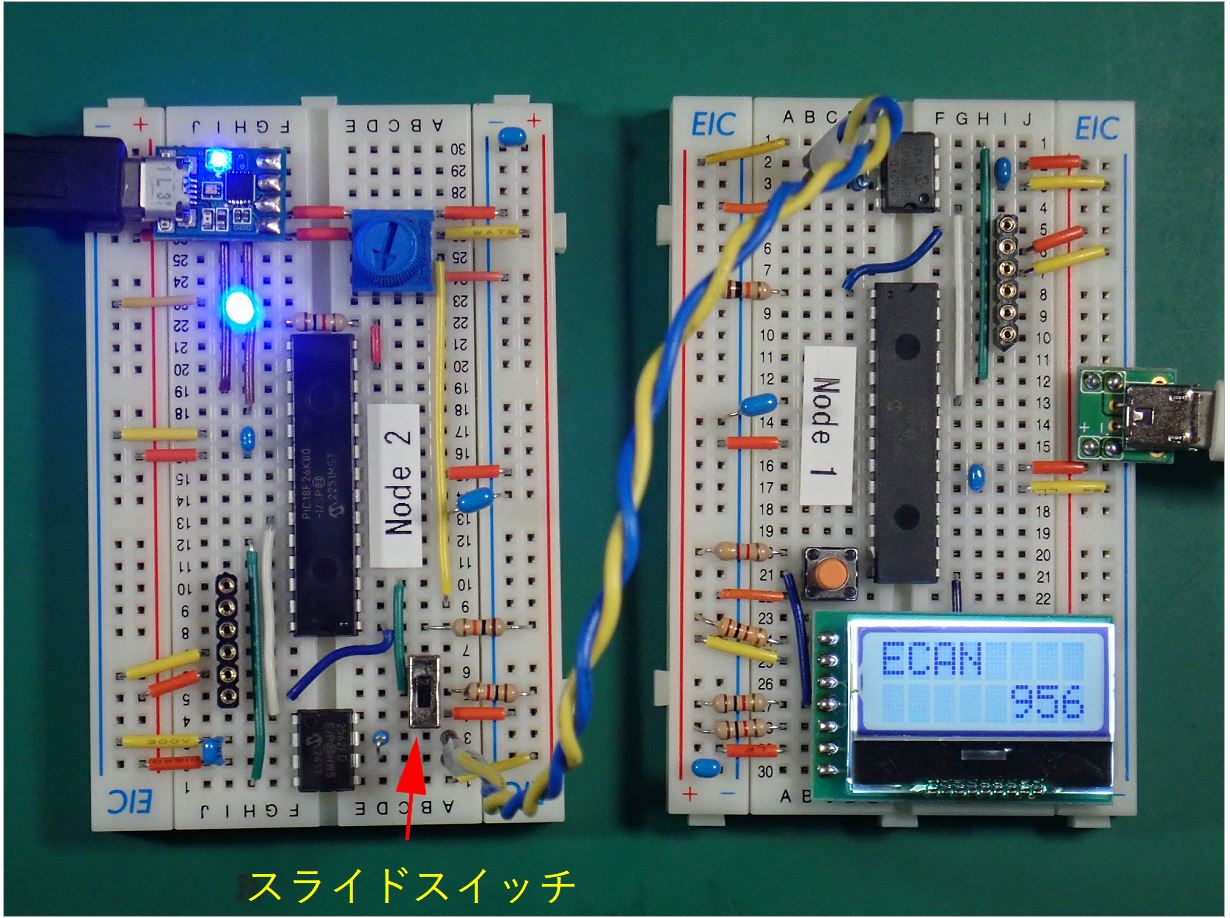
ノード2のVRつまみを回すと、ノード1のLCDにアナログ電圧値が表示され、CAN通信が正常に行われていることが確認できた。
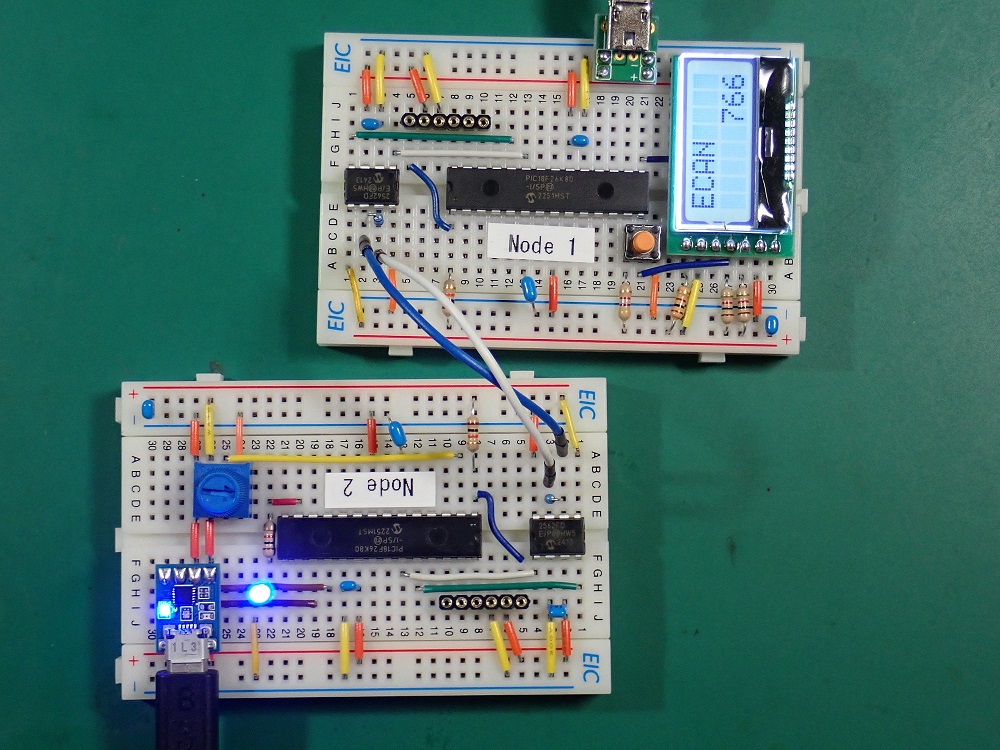 CAN 通信の実験風景(各デバイスには0.1μFのパスコンを追加) |
≪≪ ノード1 ≫≫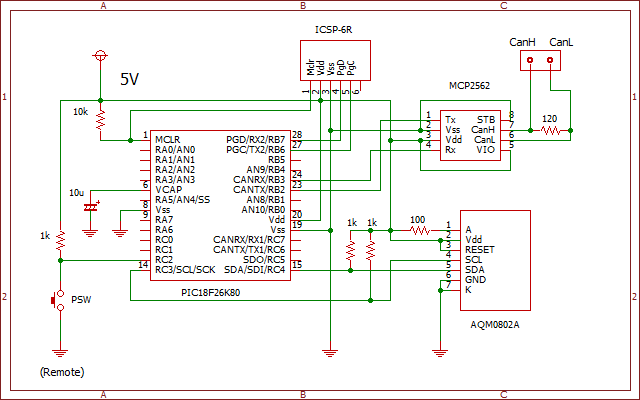 ノード1の回路図(リモート要求SW付) 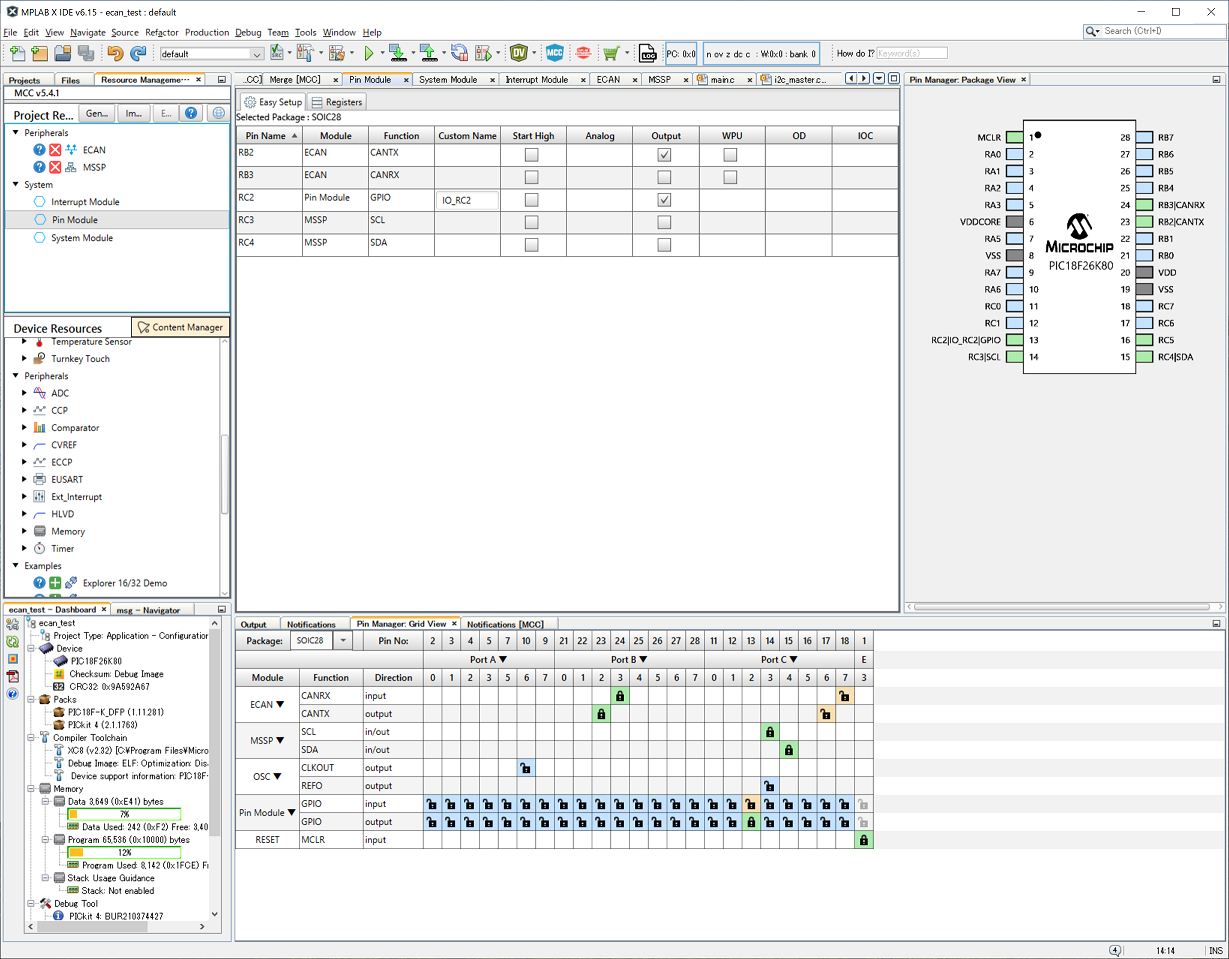 ノード1の pinモジュール(IDE6.15) 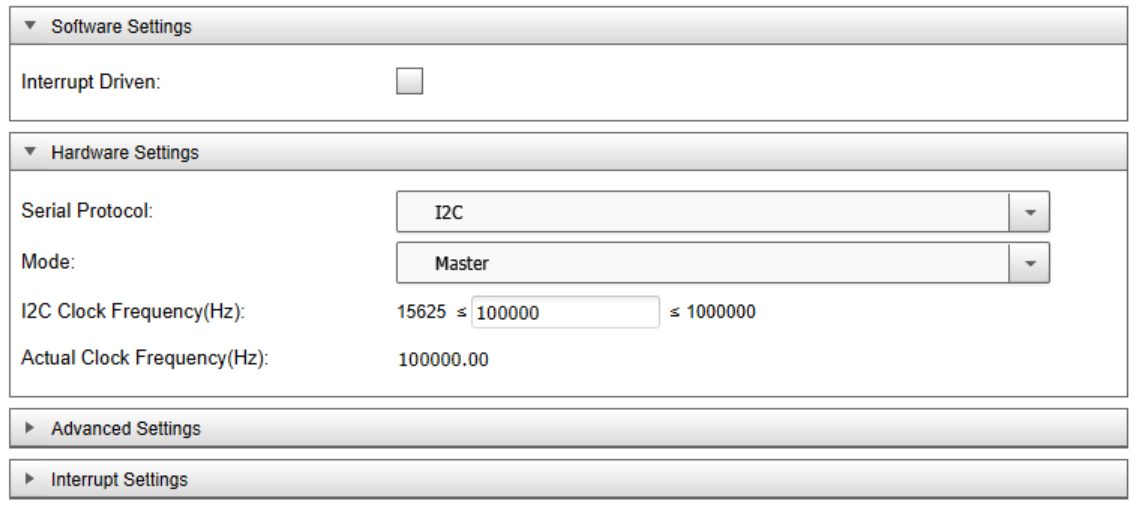 ノード1のI2Cモジュール 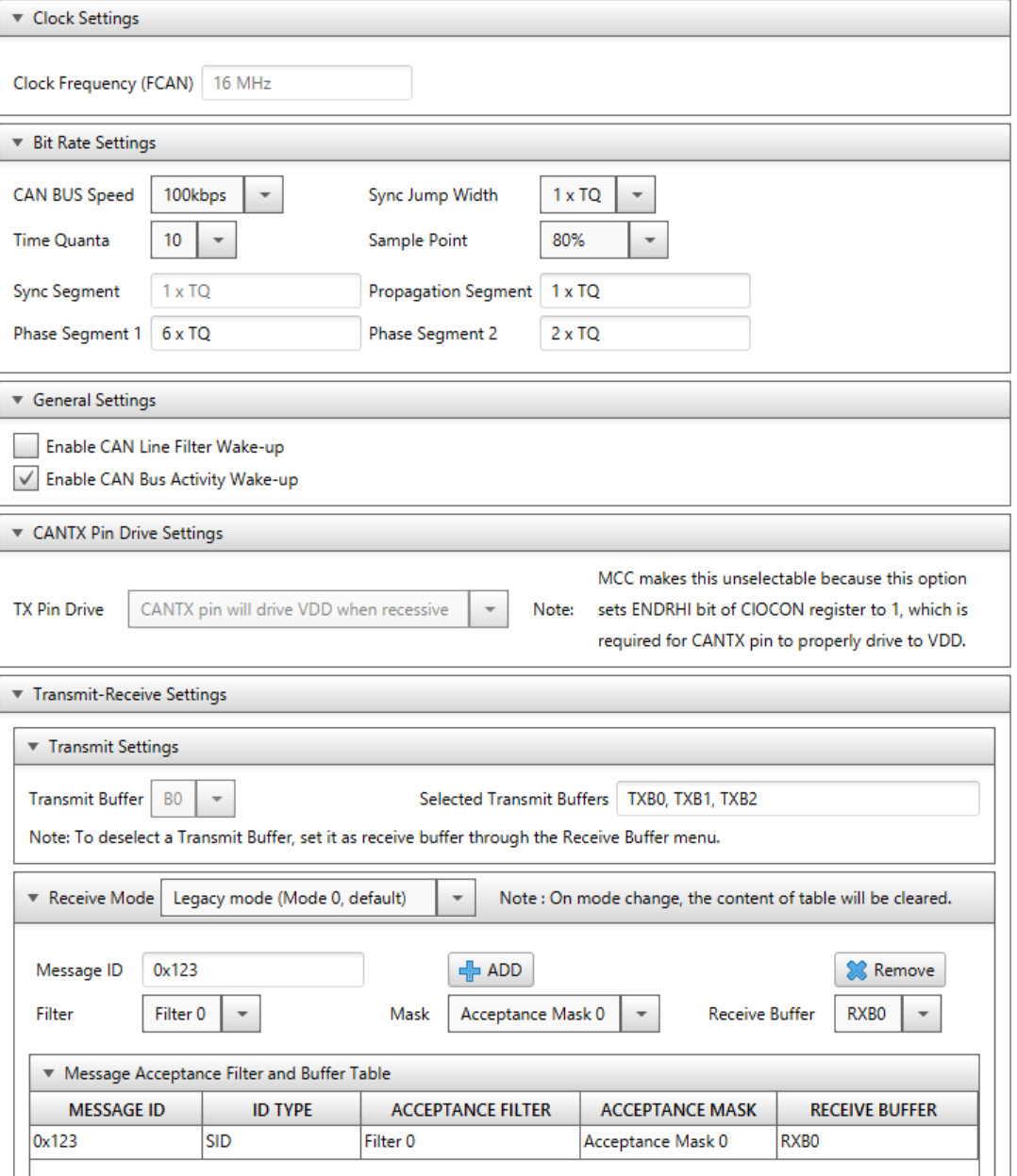 ノード1のECANモジュール(MCC5.4.1) ≪≪ ノード1・2共通 ≫≫ 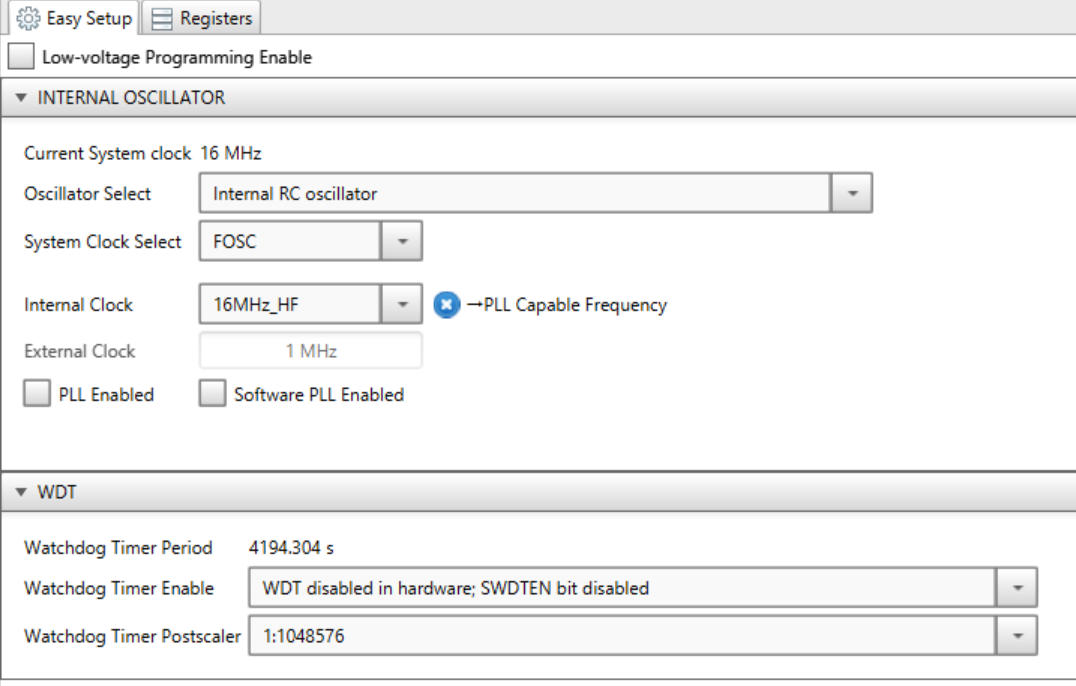 systemモジュール(ノード1・2とも同じ) |
≪≪ ノード2 ≫≫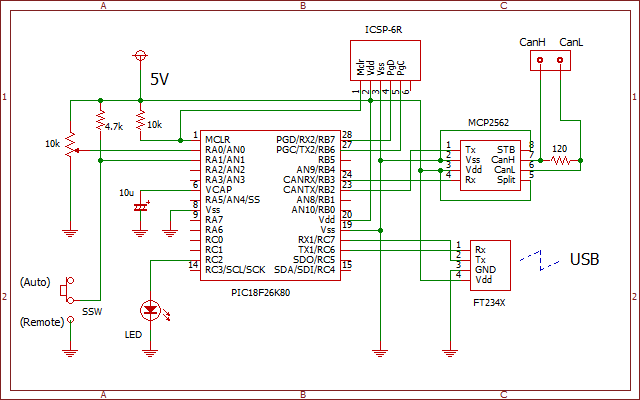 ノード2の回路図(モード切替SW付) 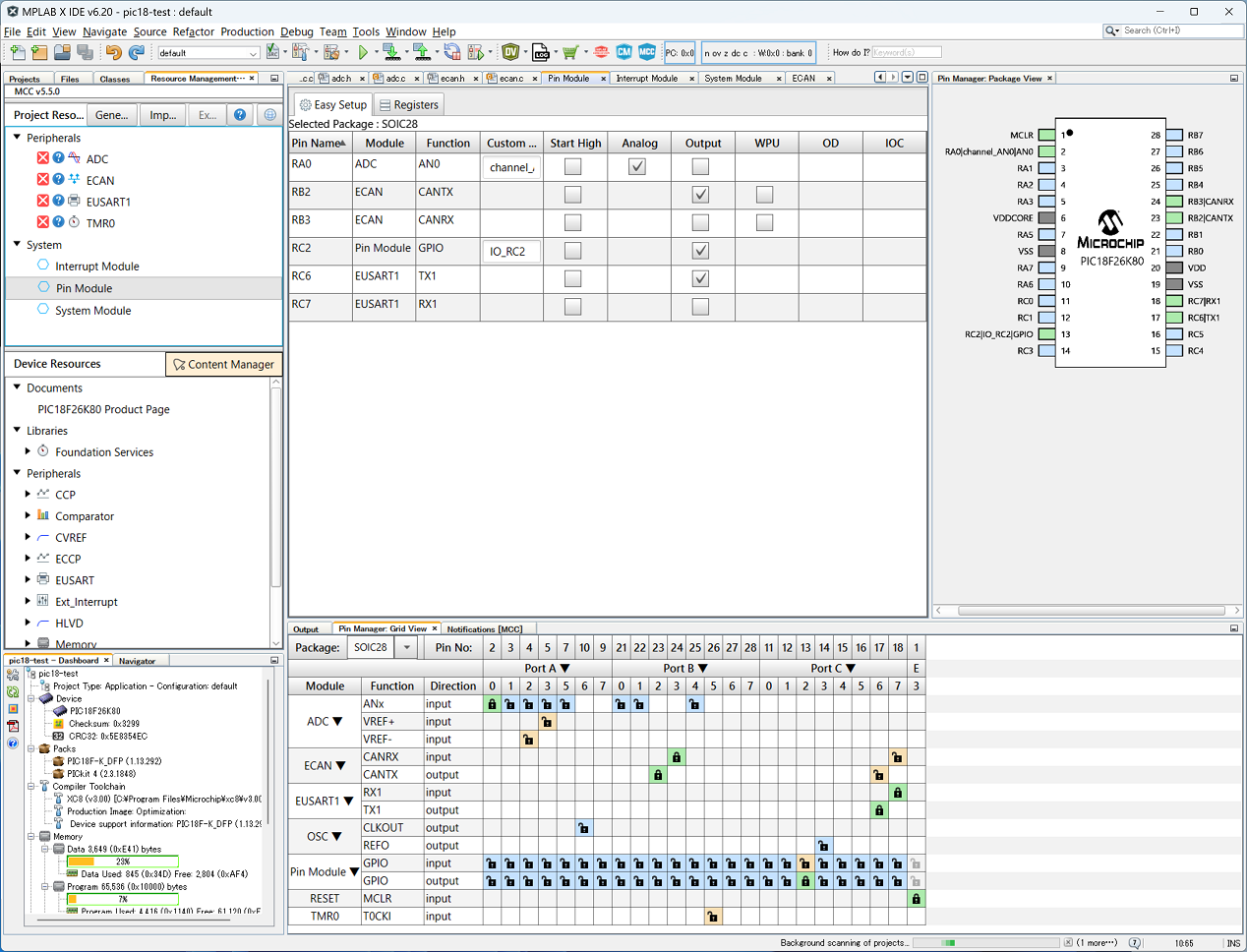 ノード2の pinモジュール(IDE6.15) 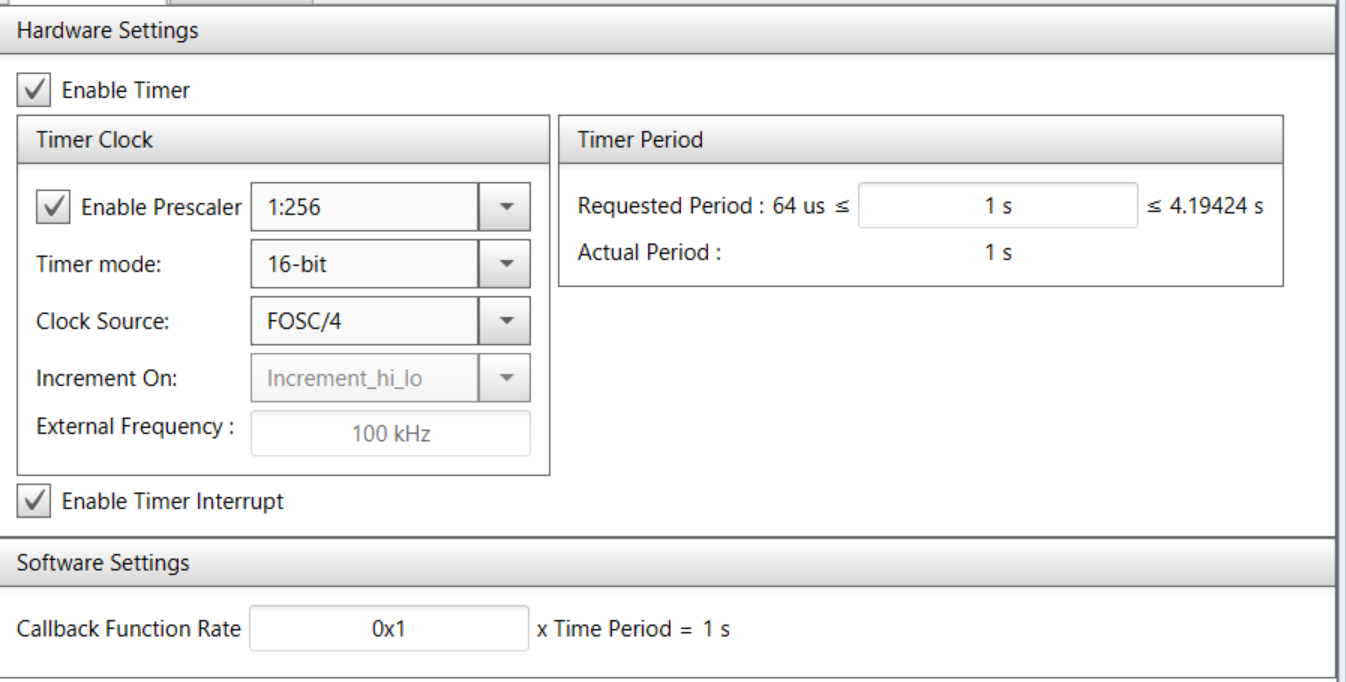 ノード2のTMR0モジュール 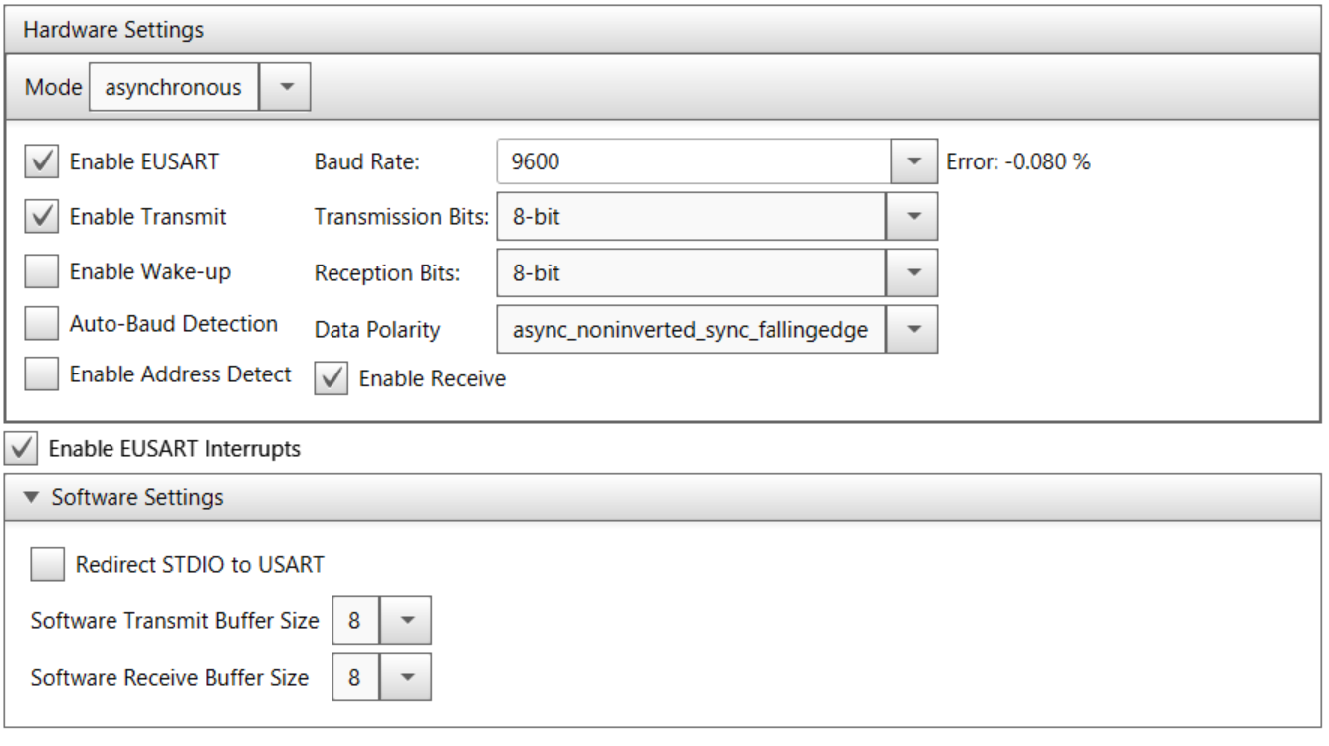 ノード2のEUSARTモジュール 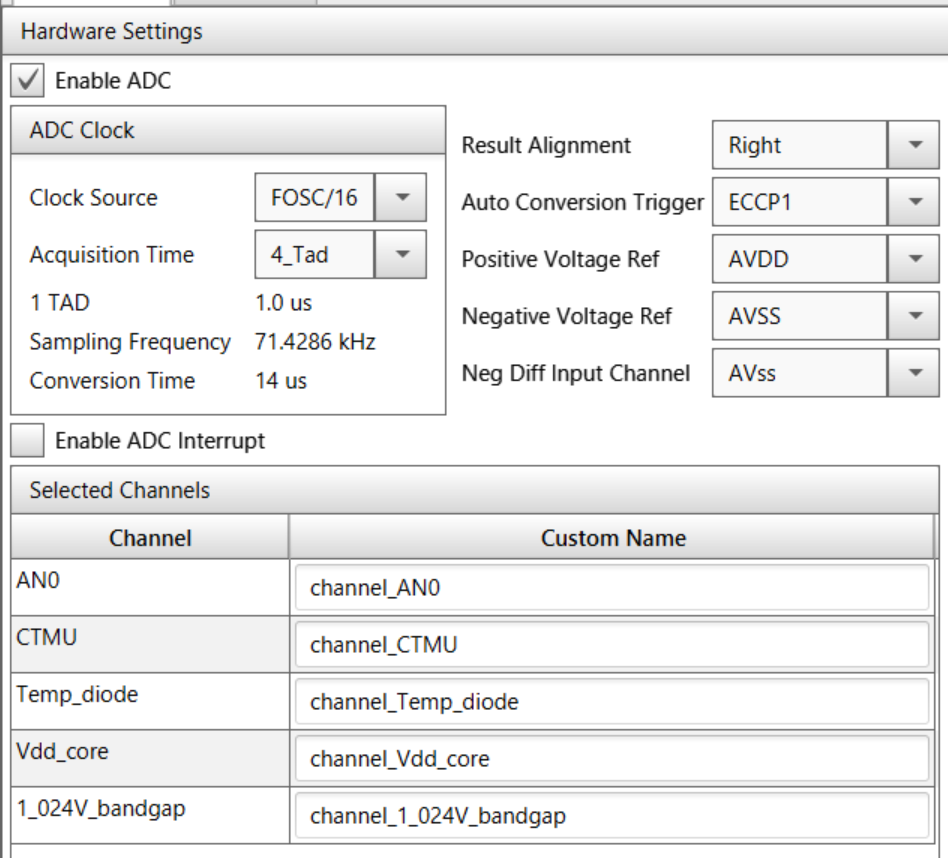 ノード2のADCモジュール 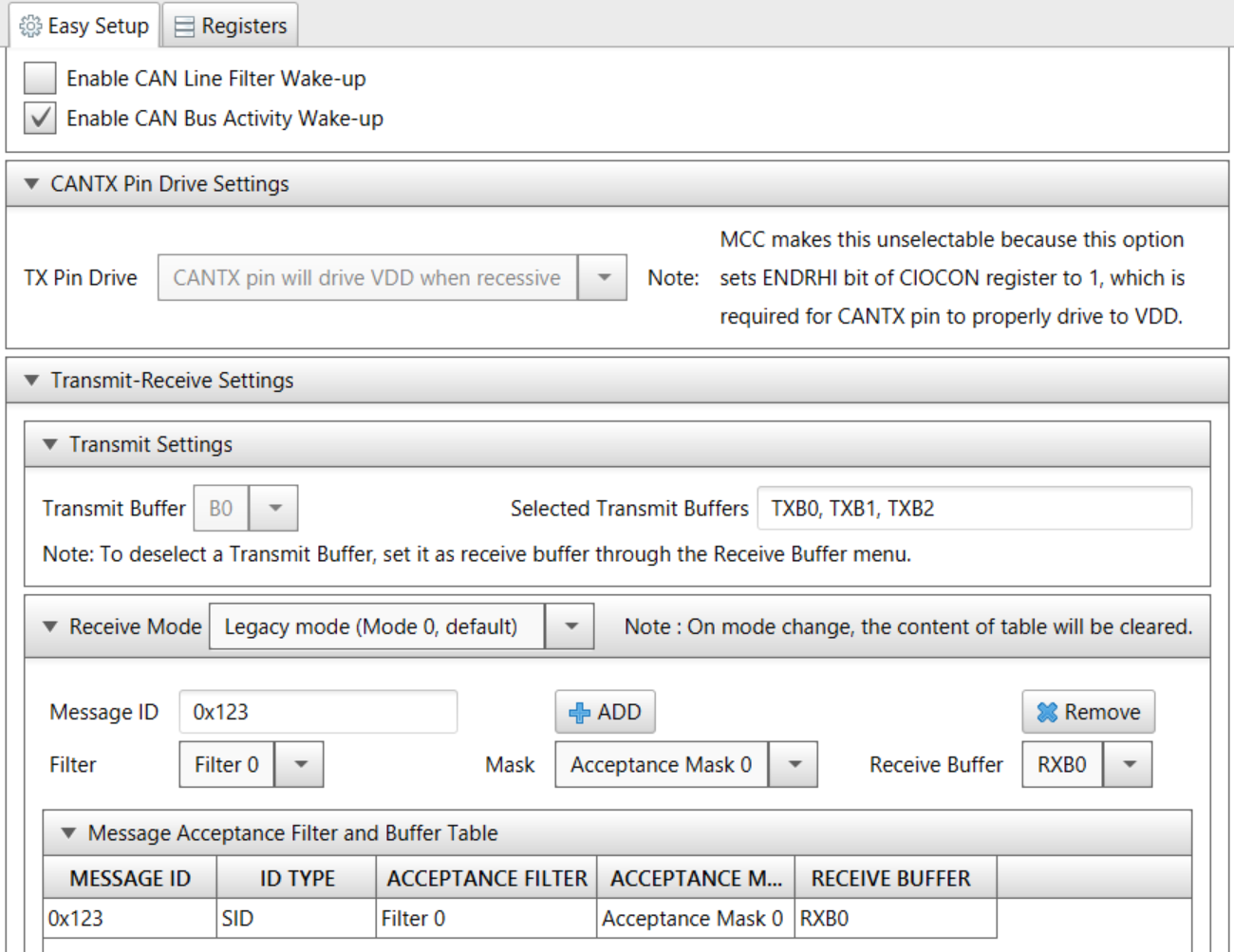 ノード2のECANモジュール(MCC5.5.0) |
【おまけ】
参考にしたページでは、データとリモートの2種類のフレーム使用例が別々に紹介されているが、両方の機能を同じハードで行えるよう、以下の機能を追加した(前述の回路図は機能追加を考慮したもの)。
 おまけ実行例(ツイストペア線使用) |
Windowsでネットワーク上にあるパソコンやプリンタを共有することができるが、Windows10(22H2)ではNAS(LS-XL89D)も含めて、問題なくアクセスできていたのに、Windows11(24H2)では、デバイスのアイコンも表示されなくなった。
これは、PCの故障ではなく、ネットワーク検索など、Windowsの設定(仕様)が変更されたためで、特に古い規格であるSMB1.0は、デフォルトで使用できなくなっている。
他にも、変更された所が幾つかあるようで、以下を参照に、設定を変更してみた。
この様な症状時の対策は、
①で指摘のあった、上記の設定を全て確認・変更を行って、PCを再起動してみたが、それでも、デバイスのアイコンが表示されなかった。
そこで、②に記載の「ネットワークの設定をリセットする」(詳細は③を参照)を実行し、PCを再起動したところ、ネット接続中のPCのアイコンは表示されるようになった。しかし、古いNAS(LS-XL89D)のアイコンはSMB1.0を有効にしても表示されなかった。
さらに、windows11では、共有アクセス時に資格情報(ユーザー名/パスワード)を要求する仕様が強化されたようで、「ユーザーアカウント」→「資格情報マネージャー」からLS-XL89Dの資格情報を設定してみたが・・、アイコンは表示されなかった。
SMB2/3対応のNASに変更するしか無いのかな・・・。
ここまでで、一応、他のPCのアイコンが「ネットワーク画面」に表示されるようになったので、④を参照に、「ファイルの共用」を設定すると、2つのPC間でファイルの共用が出来るようにはなった。
LS-XL89Dはかなり古いので、今後の故障等を考慮して、新しいNASとしてLS710D040を入手した。
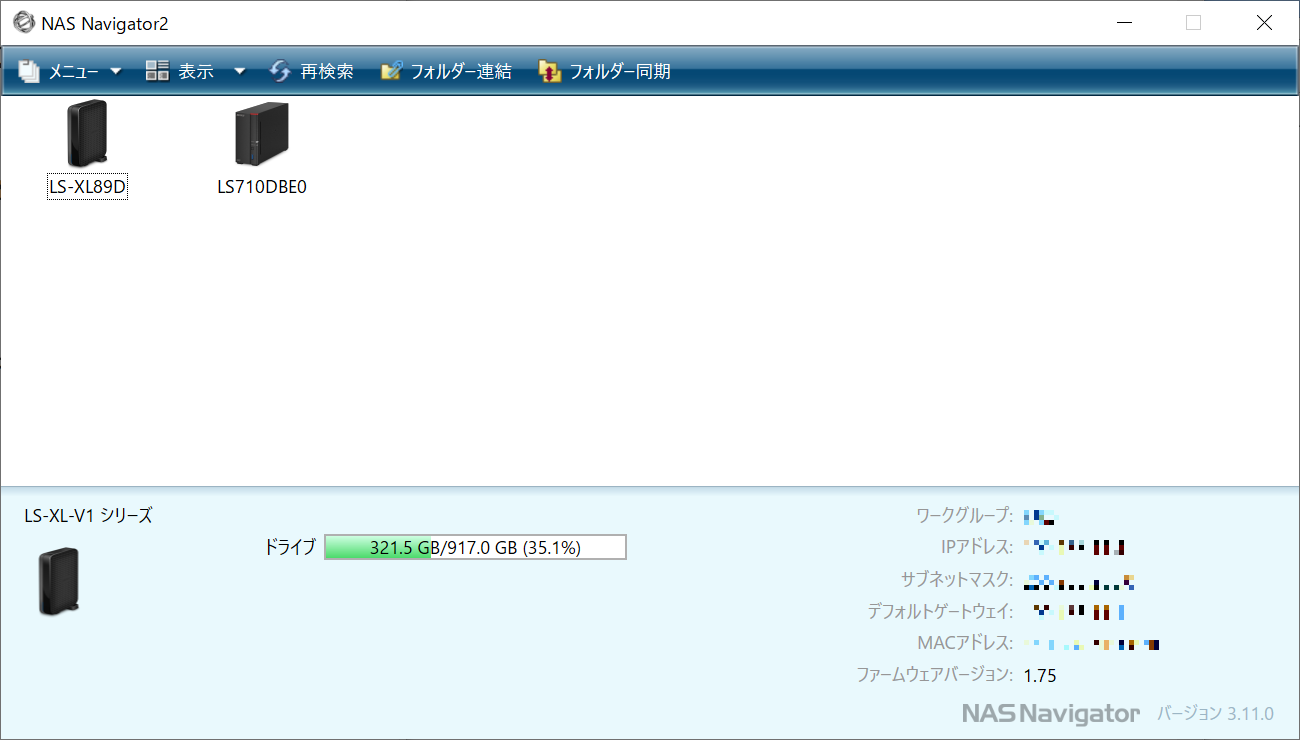 NAS Navigator2 画面 |
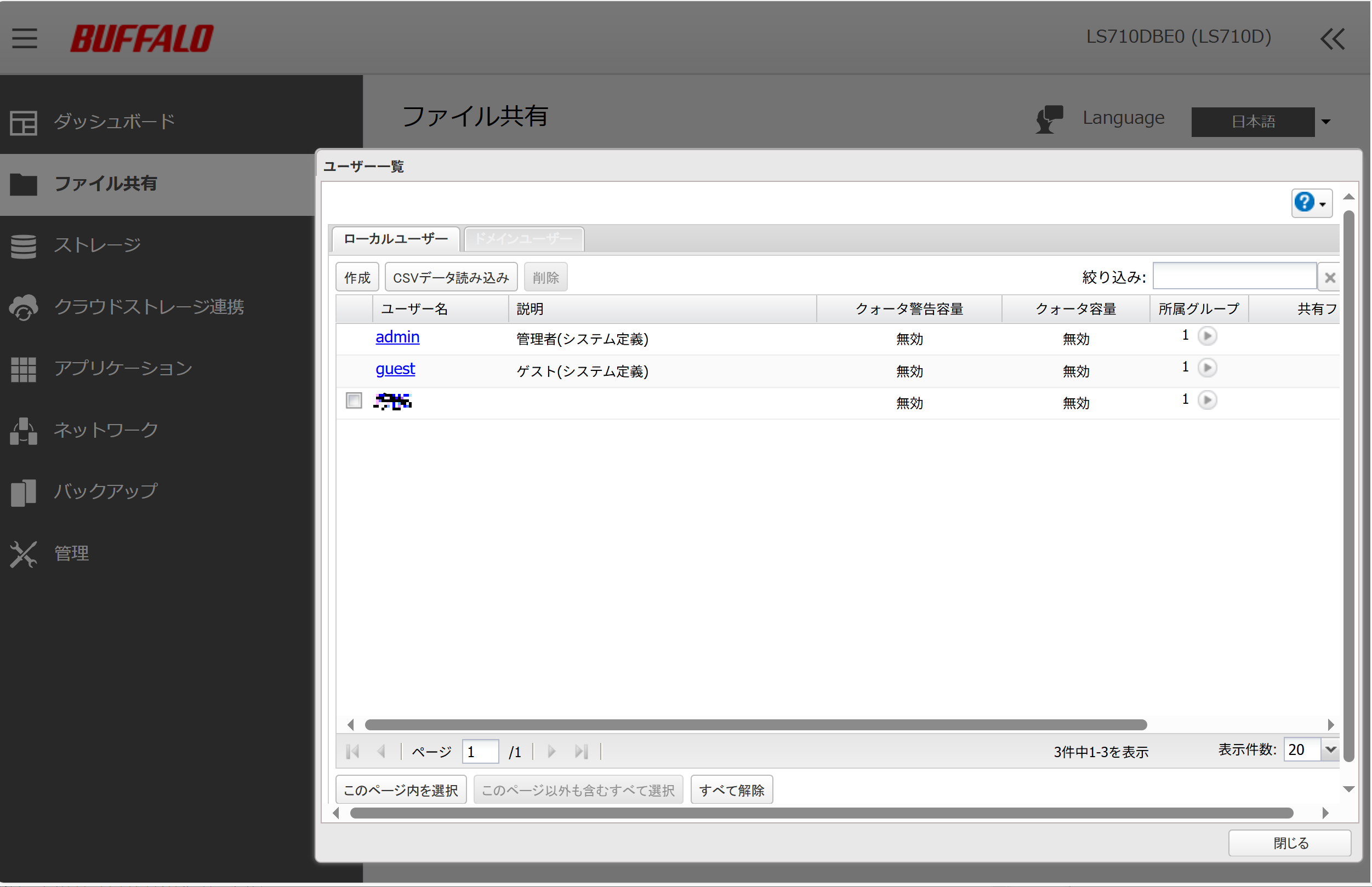 ファイル共有/ユーザー 設定画面 |
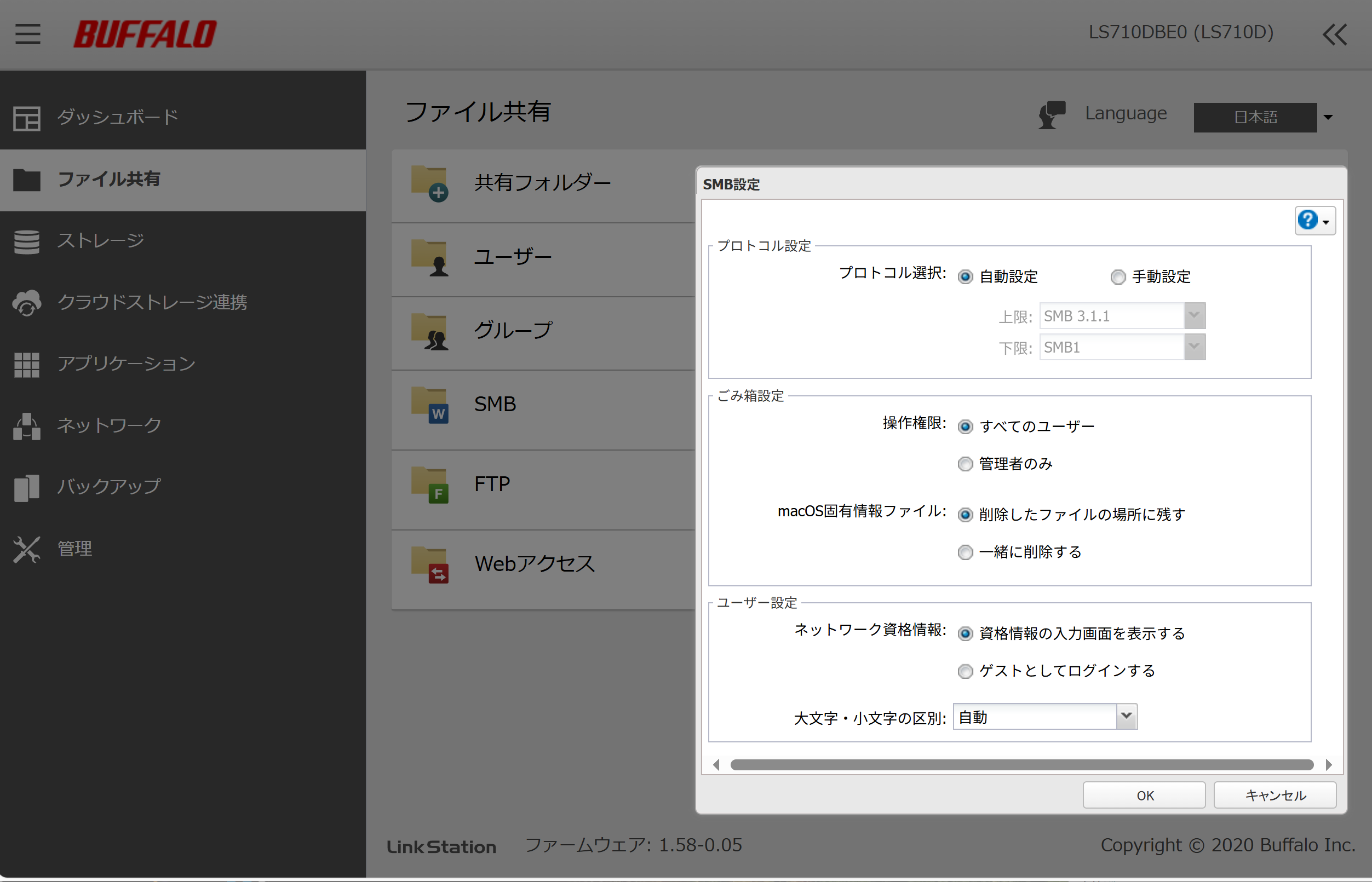 ファイル共有/SMB 設定画面 |
![]()
| ≪≪ ノード1 ≫≫ ▼abc927-26k80-1.zip | ≪≪ ノード2 ≫≫ ▼abc927-26k80-2.zip | |
|---|---|---|
|
|
|
|
![]() 【おまけ】(デ-タ+リモート)
【おまけ】(デ-タ+リモート)
| ≪≪ ノード1 ≫≫(一部を抜粋) ▼abc927-26k80-1R.zip | ≪≪ ノード2 ≫≫(一部を抜粋) ▼abc927-26k80-2R.zip | |
|---|---|---|
|
|
★もし、delaey関数がC99でエラーとなる場合、以下のマクロ記述を追加
|
【その他のプログラム】
※プログラムのリストをハイライト無しのスタイルで見る場合はここをクリック
※ 本レポートの参考・利用は、あくまでも自己責任でお願いします。
 |
 |
 |